Bipoli lineari e non lineari attivi e passivi
Bipoli lineari e non lineari attivi e passivi
Questo sito utilizza cookie, anche di terze parti. Se vuoi saperne di più leggi la nostra Cookie Policy. Scorrendo questa pagina o cliccando qualunque suo elemento acconsenti all’uso dei cookie.I testi seguenti sono di proprietà dei rispettivi autori che ringraziamo per l'opportunità che ci danno di far conoscere gratuitamente a studenti , docenti e agli utenti del web i loro testi per sole finalità illustrative didattiche e scientifiche.
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
Bipoli lineari e non lineari attivi e passivi
INTRODUZIONE AI BIPOLI
1. Funzioni e operatori
Le funzioni sono leggi matematiche che associano ad ogni elemento di un insieme X (dominio) un elemento di un insieme Y (codominio). Ad esempio
è una funzione.
Gli operatori sono leggi matematiche che associano ad una funzione un’altra funzione; ad esempio
è un operatore; osserviamo che, in generale, un operatore può anche associare ad una funzione di una certa variabile una funzione di una differente variabile (le trasformate e le antitrasformate di Laplace e Fourier sono esempi notevoli di tale tipo di operatori). Nel caso più semplice la funzione di ingresso e la funzione di uscita dell’operatore sono funzioni di una variabile e ad un valore; nel caso più generale entrambe sono funzioni di più variabili e a più valori.
2. Segnali, sistemi e operatori associati a sistemi
Un segnale è una qualsiasi grandezza fisica (chimica,…) che evolve nel tempo; i segnali sono quindi funzioni che hanno come dominio il tempo e come codominio l’insieme di tutti i valori che possono essere assunti dalla grandezza fisica (chimica,…) associata al segnale.
Esempi di segnali sono: la differenza di potenziale tra due nodi di un circuito, la velocità di un autoveicolo, la temperatura di un oggetto, la posizione di una manopola,…
I sistemi trasformano uno o più segnali di ingresso in uno o più segnali di uscita; la trasformazione operata da un sistema è descritta matematicamente da un operatore; ad esempio un forno può essere schematizzato come un operatore
che associa alla posizione di una manopola (segnale x(t)) la temperatura interna (segnale y(t)).
L’operatore associato ad un sistema fisico trasforma un segnale (cioè ad una funzione del tempo) in un altro segnale (cioè un’altra funzione del tempo).
3. Proprietà dei sistemi e degli operatori: linearità, tempo invarianza e causalità
Un sistema descritto dall’operatore Z è lineare se e solo se per ogni coppia di numeri reali c1e c2 e per ogni coppia di funzioni x1(t) e x2(t) appartenenti al dominio dell’operatore Z si ha

Le funzioni x1(t), x2(t), Z[x1(t)] e Z[x2(t)] sono, nel caso generale, funzioni a più valori, ma sono comunque (per le definizioni di sistema e di segnale) funzioni di una sola variabile t (tempo).
Un sistema descritto dall’operatore Z è tempo invariante se e solo se per ogni intervallo di tempo t0 e per ogni funzione x(t) appartenente al dominio dell’operatore Z si ha

Un sistema descritto dall’operatore Z è causale se e solo se per ogni coppia di funzioni x1(t) e x2(t) appartenenti al dominio dell’operatore Z la condizione

implica anche

Equivalentemente un sistema è causale se e solo se i segnali di uscita negli istanti precedenti l’istante t0non dipendono in alcun modo dai valori assunti dai segnali di ingresso in tempi successivi a t0.
I sistemi fisici sono sistemi causali poiché l’effetto non può precedere la causa.
I sistemi fisici sono generalmente tempo varianti e non lineari poiché le loro caratteristiche cambiano al trascorrere del tempo (ad esempio i sistemi realizzati da uomini non esistevano, e cioè erano molto diversi, miliardi di anni fa) e sono non lineari (si pensi alla saturazione degli amplificatori o ai valori limite delle tensioni o correnti ammissibili all’ingresso dei dispositivi). Nonostante ciò, considerando chel’analisi di sistemi lineari e tempo invarianti è estremamente più semplice dell’analisi di sistemi non lineari e/o tempo varianti e che l’approssimazione di sistema lineare e tempo invariante è accettabile in molti casi pratici, nella maggior parte delle applicazioni i sistemi fisici sono schematizzati come sistemi lineari, tempo invarianti e causali.
4. Circuiti elettronici
Una rete elettronica o un circuito elettronico è un sistema costituito da componenti (resistori, induttori, condensatori, generatori di tensione, generatori di corrente, transistor…) connessi tra loro in modo arbitrario.
In termini sistemistici un circuito che ha N nodi e R rami e, come ingressi, L generatori indipendenti di corrente e M generatori indipendenti di tensione, è un sistema che associa
alle M tensioni di ingresso vi1(t), vi2(t),… , viM(t) e alle L correnti di ingresso ii1(t), ii2(t),…, iiL(t)
le tensioni di tutti gli N nodi del circuito vn1(t), vn2(t),…, vnN(t), e le correnti di tutti gli Rrami del circuito ir1(t), ir2(t),…, irR(t). In termini matematici il circuito può quindi essere descritto dall’operatore

Considerando che un circuito è un particolare tipo di sistema, le definizioni di linearità, tempo invarianza e causalità relative ai sistemi definiscono anche la linearità, la tempo invarianza e la causalità dei circuiti.
I diversi componenti circuitali possono essere classificati in base al numero di terminali di cui sono dotati; i più semplici componenti circuitali hanno solo due terminali (esistono anche componenti a tre, quattro o più terminali) e sono detti bipoli.
5. Bipoli
5.1 I versi coordinati di tensione e corrente di un bipolo
Lo stato elettrico di un bipolo (vedi figura 1) è caratterizzato da due grandezze elettriche: la tensione ai capi del bipolo, v(t), e la corrente attraverso il bipolo, i(t).
Per convenzione, dato un qualsiasi bipolo, i versi della tensione ai capi del bipolo e della corrente attraverso il bipolo devono essere scelti in modo coordinato, cioè in modo che il prodotto

sia pari alla potenza assorbita dal bipolo all’istante t, passorbita(t); da considerazioni fisiche si deduce che la potenza assorbita da un bipolo è pari al prodotto della tensione e della corrente del bipolo solo se tensione e corrente sono considerate con i versi coordinati come mostrato in figura 1 (la corrente viene considerata positiva se entrante nel terminale positivo).
La potenza erogata dal bipolo allo stesso istante t sarà invece

|
Figura 1 Simbolo di un generico bipolo |

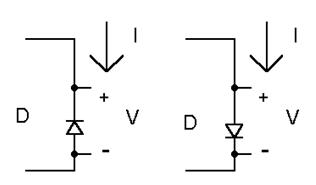
In conclusione, dato un qualsiasi bipolo, si può scegliere il verso della corrente attraverso il bipolo, ma questa scelta automaticamente fissa anche il verso della tensione ai capi del bipolo (in modo duale: si può scegliere il verso della tensione ai capi del bipolo, ma questa scelta automaticamente fissa anche il verso della corrente attraverso il bipolo). A titolo di esempio la figura 2 mostra le due possibili scelte per un diodo; la figura 3 mostra invece le due scelte non corrette per un diodo. Si tenga presente che, pur essendo la scelta dei versi coordinati della corrente e della tensione solo una convenzione, è buona norma adottarla sempre (in caso contrario, ad esempio, la resistenza di un resistore metallico e la capacità di un condensatore piano possono essere negative, come spiegato nel seguito); come eccezione (vedi nel seguito), per i generatori di tensione e di corrente si utilizza la convenzione opposta, risultando in questo caso il prodotto  pari alla potenza erogata (cioè generata) dal generatore.
pari alla potenza erogata (cioè generata) dal generatore.
|
|
Figura 2 Scelte concordi con la convenzione sui versi coordinati di corrente e tensione |
Figura 3 Scelte non concordi con la convenzione sui versi coordinati di corrente e tensione |
5.2 Relazione tra la tensione e la corrente di un bipolo
Un bipolo impone una relazione tra la corrente e la tensione ai suoi capi; questa relazione è detta relazione costitutiva del bipolo.
Supponiamo che per un dato bipolo la conoscenza della tensione, v(t), consenta di ricavare in modo univoco la corrente, i(t); in questo caso possiamo scrivere
dove Z è un operatore (Z associa una funzione ad un’altra funzione); in questo caso il bipolo è quindi un sistema che associa ad un segnale di ingresso (tensione) un segnale di uscita (corrente).
Nel caso duale in cui, per un dato bipolo, la conoscenza della corrente, i(t), consenta di ricavare in modo univoco la tensione, v(t), possiamo invece scrivere

dove anche W è un operatore; in questo caso il bipolo è quindi un tipo particolare di sistema che associa ad un segnale di ingresso (corrente) un segnale di uscita (tensione).
Nel seguito sarà evidente che per un tipo particolare di bipoli (generatori ideali di corrente) può essere definito solo l’operatore Z ma non l’operatore W, mentre per un altro tipo di bipoli (generatori ideali di tensione) può essere definito solo l’operatore W ma non l’operatore Z; in molti altri casi (resistori, condensatori, induttori,…) è possibile definire sia l’operatore Z sia l’operatore W; in tali casi sarà ovviamente

o equivalentemente

Considerando che un bipolo è un particolare tipo di circuito, e quindi un particolare tipo di sistema, le definizioni di linearità, tempo invarianza e causalità relative ai sistemi definiscono anche la linearità, la tempo invarianza e la causalità dei bipoli.
Ad esempio il bipolo è tempo invariante se l’operatore associato al bipolo è tempo invariante; un caso notevole in cui l’operatore associato al bipolo non è tempo invariante si ha nelle applicazioni sensoristiche; nel caso di un resistore (definito nel seguito) la cui resistenza dipende dalla temperatura, la misura della resistenza può essere sfruttata per ricavare informazioni sulla temperatura, ma l’operatore associato a questo resistore non è tempo invariante.
5.3 Bipoli istantanei e con memoria
Consideriamo un bipolo per cui, notoil valore della correntein un qualsiasi istante, sia possibile determinare univocamente il valore della tensione al medesimo istante; in questo caso si può scrivere

e si dice che il bipolo è istantaneo perché il valore della tensione ad un certo istante t0 dipende solo dal valore della corrente allo stesso istante e non dai valori precedentemente assunti da corrente e tensione.
Nel caso duale in cui, dato un bipolo, notoil valore della tensione in un qualsiasi istante, sia possibile determinare univocamente il valore della corrente al medesimo istante, si può scrivere

e anche in questo caso il bipolo è istantaneo.
In ogni caso, per i bipoli istantanei, l’operatore che descrive la relazione tensione-corrente di un bipolo si riduce a una funzione. Le funzioni z e w possono essere rappresentate in un piano (v,i) e sono anche note come caratteristiche di trasferimento del bipolo (ad esempio si parla di caratteristica di trasferimento di un diodo).
Nel seguito sarà evidente che per un tipo particolare di bipoli (generatori ideali di corrente) può essere definita solo la funzione z ma non la funzione w, mentre per un altro tipo di bipoli (generatori ideali di tensione) può essere definita solo la funzione w ma non la funzione z; in molti altri casi (resistori, diodi,…) è possibile definire sia la funzione z sia la funzione w; in tali casi sarà ovviamente

o equivalentemente

I bipoli istantanei sono necessariamente causali e tempo invarianti; la definizione di linearità di un bipolo istantaneo si semplifica nel modo seguente: un bipolo istantaneo descritto dalla funzione z è lineare se e solo se per ogni coppia di numeri reali c1e c2 e per ogni coppia di valori dell’ingresso x1e x2appartenenti al dominio della funzione z si ha

Se un bipolo non è istantaneo si parla di bipolo con memoria perché per determinare lo stato (cioè la corrente e la tensione) del bipolo ad un generico istante t0 è necessario conoscere la “storia” delle grandezze elettriche del bipolo (cioè i valori della corrente e/o della tensione negli istanti precedenti).
6. Bipoli ideali
6.1 Il generatore indipendente di tensione
Il generatore indipendente di tensione è un bipolo caratterizzato dalla relazione costitutiva

dove f(t) è una funzione arbitraria che non dipende da altre grandezze elettriche presenti nel circuito. Per il generatore indipendente di tensione si può quindi considerare
anche se W è, in questo caso, un operatore particolare poiché associa ad ogni possibile funzione i(t) una funzione f(t) predefinita e non dipendente dalla corrente attraverso il generatore né da altre grandezze elettriche presenti nel circuito (generatore indipendente).
Qualora la tensione di uscita di un generatore di tensione dipenda da altre grandezze elettriche (tensioni e/o correnti) interne al circuito si parla di generatore di tensione controllato; i generatori di tensione controllati non sono bipoli ma reti a più porte: ad esempio un amplificatore ideale di tensione è un generatore di tensione controllato in tensione ed è un elemento a due porte (e non un bipolo); analogamente un amplificatore ideale di transresistenza è un generatore di tensione controllato in corrente ed è un elemento a due porte (e non un bipolo).
Da un punto di vista sistemistico i generatori indipendenti di tensione servono a schematizzare segnali di ingresso al sistema. In uno stesso circuito sono normalmente presenti più generatori indipendenti di tensione (le batterie necessarie per alimentare il sistema, uno o più generatori di segnali,…); in questi casi, se il circuito può essere considerato lineare, si può applicare il principio di sovrapposizione degli effetti.
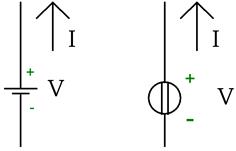
I simboli correntemente utilizzati per la rappresentazione dei generatori di tensione ideale sono mostrati in figura 4; con la scelta dei versi delle tensioni e correnti riportata in figura il prodotto  è pari alla potenza generata (e non alla potenza assorbita) dal generatore.
è pari alla potenza generata (e non alla potenza assorbita) dal generatore.
|
Figura 4 Simboli per i generatori di tensione ideali; il simbolo a sinistra viene utilizzato solo per le tensioni costanti |
La caratteristica di trasferimento di un generatore di tensione costante ideale è mostrata in figura 5. La realizzazione fisica di un generatore indipendente di tensione è impossibile; si immagini infatti di poter realizzare due generatori ideali di tensione con relazioni costitutive
Collegando i due generatori di tensione in parallelo si avrebbe

in contraddizione con l’assunzione precedente  .
.
Nel seguito si esaminerà un metodo più realistico per schematizzare i generatori di tensione reali. A titolo di esempio la caratteristica di trasferimento v-i di un diodo Zener sono mostrate in figura 6; è evidente che la tensione di uscita dipende dalla corrente, eliminando l’assurdo fisico precedentemente discusso.
|
Figura 5 Caratteristica di trasferimento di un generatore di tensione costante ideale |
|
Figura 6 Caratteristiche di trasferimento di un diodo Zener |
6.2 Il generatore indipendente di corrente
Il generatore indipendente di corrente è un bipolo caratterizzato dalla relazione costitutiva

dove f(t) è una funzione arbitraria che non dipende da altre grandezze elettriche presenti nel circuito. Per il generatore indipendente di corrente si può quindi considerare
anche se Z è, in questo caso, un operatore particolare poiché associa ad ogni possibile funzione v(t) una funzione f(t) predefinita e non dipendente dalla tensione ai capi del generatore né da altre grandezze elettriche presenti nel circuito (generatore indipendente).
Qualora la corrente di uscita di un generatore di corrente dipenda da altre grandezze elettriche (tensioni e/o correnti) interne al circuito si parla di generatore di corrente controllato; i generatori di corrente controllati non sono bipoli ma reti a più porte: ad esempio un amplificatore ideale di corrente è un generatore di corrente controllato in corrente ed è un elemento a due porte (e non un bipolo); analogamente un amplificatore ideale di transconduttanza è un generatore di corrente controllato in tensione ed è un elemento a due porte (e non un bipolo).
Da un punto di vista sistemistico i generatori indipendenti di corrente servono a schematizzare segnali di ingresso al sistema.
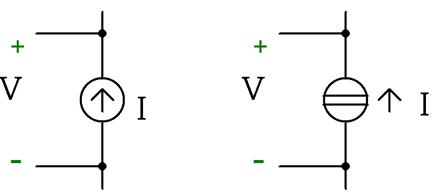
I simboli correntemente utilizzati per la rappresentazione dei generatori di corrente ideale sono mostrati in figura 7; con la scelta dei versi delle tensioni e correnti riportata in figura il prodotto  è pari alla potenza generata (e non alla potenza assorbita) dal generatore. La caratteristica di trasferimento di un generatore di corrente ideale è mostrata in figura 8.
è pari alla potenza generata (e non alla potenza assorbita) dal generatore. La caratteristica di trasferimento di un generatore di corrente ideale è mostrata in figura 8.
La realizzazione fisica di un generatore indipendente di corrente è impossibile; si immagini infatti di poter realizzare due generatori ideali di corrente con relazioni costitutive
Collegando i due generatori di corrente in serie si avrebbe

in contraddizione con l’assunzione precedente  .
.
Nel seguito si esaminerà un metodo più realistico per schematizzare i generatori di corrente reali; a titolo di esempio le caratteristiche di trasferimento (per diversi valori delle correnti di base) di uscita di un transistor bipolare connesso a emettitore comune sono mostrate in figura 9; è evidente che la corrente di uscita dipende dalla tensione di uscita, eliminando l’assurdo fisico precedentemente discusso.
|
Figura 7 Simboli per i generatori di corrente ideali |
|
Figura 8 Caratteristica di trasferimento di un generatore di corrente costante ideale |
|
Figura 9 Caratteristiche di uscita di un transistor bipolare connesso a emettitore comune |
6.3 Resistore ideale
Un resistore ideale è un bipolo caratterizzato dalla relazione costitutiva
dove R è una costante reale e positiva detta resistenza (unità di misura: Ohm, Ω).
L’operatore Z è invertibile e si ha

Il simbolo correntemente utilizzato per la rappresentazione del resistore ideale è mostrato in figura 10.
Dalle definizioni precedenti è semplice vedere che il resistore è un bipolo lineare, tempo invariante e causale; inoltre l’equazione costitutiva del resistore può anche essere espressa come segue
cioè il resistore è anche un bipolo istantaneo.
La potenza assorbita da un resistore è completamente dissipata per effetto Joule; il resistore non può né accumulare né cedere energia, ma solo dissiparla.
In un resistore si avrà

cioè, essendo la resistenza una costante reale e positiva, la potenza assorbita è sempre maggiore o uguale di zero, coerentemente con quanto noto dalla fisica; si noti che, se i versi della corrente e della tensione di un resistore fossero scelti in modo non coordinato e se si considerasse comunque  , per schematizzare la natura dissipativa di un resistore fisico sarebbe necessario considerare una resistenza negativa!
, per schematizzare la natura dissipativa di un resistore fisico sarebbe necessario considerare una resistenza negativa!
Osserviamo infine che in alcuni casi (ad esempio nelle applicazioni sensoristiche) la resistenza può essere non costante ma dipendente da altre grandezze fisiche (temperatura, umidità, pressione,…); in tal caso non si può parlare di resistore ideale (e, in particolare, il resistore non sarebbe tempo invariante).
|
Figura 10 Simbolo per il resistore |

6.4 Condensatore ideale
Un condensatore ideale è un bipolo per cui l’operatore lineare Z e il suo operatore inverso Z-1sono così definiti
dove C è una costante reale e positiva detta capacità del condensatore (unità di misura: Farad, F; è semplice ricavare dalle precedenti equazioni che 1F = 1s / 1Ω).
Il simbolo correntemente utilizzato per la rappresentazione del condensatore ideale è mostrato in figura 11.
|
Figura 11 Simbolo per il condensatore |

Dalla definizione dell’operatore Z-1si nota che, se il condensatore è considerato come un sistema che ha in uscita la tensione, è necessario considerare come segnali di ingresso sia la corrente sia la tensione iniziale ai capi del condensatore (questa osservazione è fondamentale per riconoscere che il condensatore è un bipolo lineare poiché solo in questo modo, raddoppiando tutti i segnali di ingresso, viene raddoppiato anche il segnale di uscita); se invece il condensatore è considerato come un sistema che ha in uscita la corrente, l’unico segnale di ingresso è la tensione.
Dalle definizioni precedenti si può verificare che il condensatore è un bipolo lineare, tempo invariante e non istantaneo (cioè con memoria).
Il condensatore è un “elemento inerziale” per la tensione ai suoi capi, cioè “si oppone” alle variazioni della tensione ai suoi capi; si consideri ad esempio un condensatore chiuso su un circuito in grado di erogare una corrente minore o uguale, in modulo, di Imax; è facile osservare che
cioè la limitazione sulla massima corrente che il circuito riesce a fornire per “caricare” il condensatore si riflette in una limitazione sulla massima variazione della tensione ai capi del condensatore nell’unità di tempo (o equivalentemente in una limitazione sulla velocità di “carica” del condensatore). Anche se il condensatore è un “elemento inerziale” per la tensione ai suoi capi, si vedrà nel seguito (partitore compensato) che l’inserimento di un opportuno condensatore in un circuito può rendere il circuito più veloce.
Dalle relazioni precedenti si osserva anche che se la tensione v(t) ai capi di un condensatore è costante, la corrente i(t) attraverso il condensatore è nulla, cioè il condensatore si comporta come un circuito aperto.
Dato un condensatore ideale si ha, scegliendo i versi coordinati di tensione e corrente,

In generale un condensatore può sia assorbire sia cedere corrente (cioè il segno di passorbita(t) non è necessariamente positivo, come avviene per i resistori); un condensatore ideale infatti non dissipa energia ma la può immagazzinare o cedere; l’energia immagazzinata (sotto forma di energia elettrostatica) in un condensatore all’istante t è

Per ricavare questa relazione si consideri che l’energia assorbita dal condensatore non viene dissipata, ma solo immagazzinata, cioè
Considerando la relazione tensione-corrente stabilita dal condensatore possiamo quindi ricavare
Considerando il condensatore scarico (v = 0) all’istante t0 ed essendo l’energia immagazzinata in un condensatore scarico nulla, si deduce
La densità volumica di energia (cioè l’energia per unità di volume) nello spazio compreso tra le armature di un condensatore è

6.5 Induttore ideale
Un induttore ideale è un bipolo per cui l’operatore lineare Z e il suo operatore inverso Z-1sono così definiti
dove L è una costante reale e positiva detta induttanza dell’induttore (unità di misura: Henry, H; è semplice ricavare dalle precedenti equazioni che 1H = 1Ω * 1s ).
Il simbolo correntemente utilizzato per la rappresentazione dell’induttore ideale è mostrato in figura 12.
|
Figura 12 Simbolo per l’induttore |
Dalla definizione dell’operatore Z si nota che, se l’induttore è considerato come un sistema che ha in uscita la corrente, è necessario considerare come segnali di ingresso sia la tensione sia la corrente iniziale attraverso l’induttore (questa osservazione è fondamentale per riconoscere che l’induttore è un bipolo lineare poiché solo in questo modo, raddoppiando tutti i segnali di ingresso, viene raddoppiato anche il segnale di uscita); se invece l’induttore è considerato come un sistema che ha in uscita la tensione, l’unico segnale di ingresso è la corrente.
Dalle definizioni precedenti si può verificare che l’induttore è un bipolo lineare, tempo invariante e non istantaneo (cioè con memoria).
L’induttore è un “elemento inerziale” per la corrente che lo attraversa; si consideri infatti un induttore chiuso su un circuito in grado di generare una tensione minore o uguale, in modulo, di Vmax; è facile osservare che
cioè la limitazione sulla massima tensione che il circuito riesce a fornire all’induttore si riflette in una limitazione sulla massima variazione della corrente attraverso l’induttore nell’unità di tempo.
Dalle relazioni precedenti si osserva anche che se la corrente i(t) attraverso l’induttore è costante, la tensione v(t) ai capi dell’induttore è nulla, cioè l’induttore si comporta come un corto-circuito.
Dato un induttore ideale si ha, scegliendo i versi coordinati di tensione e corrente,

In generale un induttore può sia assorbire sia cedere corrente (cioè il segno di passorbita(t) non è necessariamente positivo, come avviene per i resistori); un induttore ideale infatti non dissipa energia ma la può immagazzinare o cedere; l’energia immagazzinata (sotto forma di energia elettrostatica) in un induttore all’istante t è

Per ricavare questa relazione si consideri che l’energia assorbita dall’induttore non viene dissipata, ma solo immagazzinata, cioè
Considerando la relazione tensione-corrente stabilita dall’induttore possiamo quindi ricavare

Considerando la corrente attraverso l’induttore nulla (i = 0) all’istante t0 ed essendo l’energia immagazzinata in un induttore non attraversato da corrente nulla, si deduce
Per determinare la densità volumica di energia (cioè l’energia per unità di volume) nello spazio compreso all’interno delle spire di un induttore si possono considerare i seguenti passaggi (n è il numero totale di spire, l è la lunghezza dell’induttore, S è la sezione dell’induttore, ELè la densità volumica di energia)
7. Linearizzazione di bipoli istantanei non lineari
Si consideri un qualsiasi bipolo istantaneo non lineare; nell’intorno di un punto di lavoro il bipolo può essere approssimato con il polinomio di Taylor arrestato al primo ordine; indicando con i e con v rispettivamente la corrente attraverso il bipolo e la tensione ai suoi capi, si trova
La tensione ai capi del bipolo è quindi la somma di una tensione costante e di una tensione proporzionale alla corrente; poiché la tensione ai capi di un bipolo costituito dalla serie di due bipoli è la somma delle tensioni dei singoli bipoli, il polinomio di Taylor arrestato al primo ordine può essere rappresentato dalla serie di un generatore di tensione V0e di un resistore di resistenza R (vedi figura 13) dove
|
Figura 13 Linearizzazione di un bipolo istantaneo (Thevenin) |

Analogamente, considerando per un bipolo istantaneo non lineare la dipendenza della corrente dalla tensione si ottiene
cioè la corrente attraverso il bipolo è la somma di una corrente costante e di una corrente proporzionale alla tensione ai capi del bipolo; poiché la corrente attraverso un bipolo costituito dal parallelo di due bipoli è la somma delle correnti attraverso i singoli bipoli, il polinomio di Taylor arrestato al primo ordine può essere rappresentato dal parallelo di un generatore di corrente I0e di un resistore di resistenza R (vedi figura 14) dove
Si osservi inoltre che, per un dato bipolo, i circuiti di Norton e di Thevenin sono esattamente equivalenti (salvo i casi in cui R sia nulla o infinita) se si considera la stessa R e la relazione

|
Figura 14 Linearizzazione di un bipolo istantaneo (Norton) |

8. Bipoli reali
8.1 Generatori di tensione reali
Per schematizzare i generatori di tensione reali si usa considerare il circuito equivalente di Thevenin del generatore reale, cioè la serie di un generatore indipendente di tensione e di un resistore (o, nel caso più generale, di un’impedenza); questa rappresentazione equivale, in termini circuitali, alla “linearizzazione” (o sviluppo in serie di Taylor arrestata al primo ordine) del generatore.
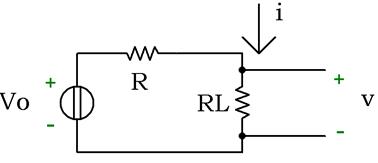
Considerando quindi un generatore reale di tensione (linearizzato) che alimenta un carico RL(vedi figura 15), la tensione ai capi del carico non coincide con V0, valore nominale del generatore di tensione, ma dipende anche dal carico; infatti
da cui si vede che più il rapporto R /RLtende a zero, più la tensione ai capi del carico tende a V0 (il caso di generatore di tensione ideale prevede infatti R nulla).
|
Figura 15 Linearizzazione di un generatore reale di tensione |
Le pile costituiscono un esempio di generatori di tensione reali.
Le pile sono bipoli in grado, sulla base di reazioni chimiche diverse, di generare “buone” tensioni continue.
Le pile sono generalmente caratterizzate dalla:
- differenza di potenziale ai capi della pila aperta (o equivalentemente chiusa su un circuito aperto)
- resistenza interna (che aumenta con l’usura)
- reversibilità (o ricarica)
- capacità, cioè quantità di carica che può essere erogata (1 A * 1 ora = 3600 C)
8.2 Generatori di corrente reali
Per schematizzare i generatori di corrente reali si usa considerare il circuito equivalente di Norton del generatore reale, cioè il parallelo di un generatore indipendente di corrente e di un resistore (o, nel caso più generale, di un’impedenza); questa rappresentazione equivale, in termini circuitali, alla “linearizzazione” (o sviluppo in serie di Taylor arrestata al primo ordine) del generatore.
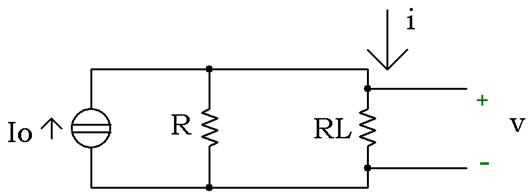
Considerando quindi un generatore reale di corrente (linearizzato) che alimenta un carico RL (vedi figura 16), la corrente ai capi del carico non coincide con I0, valore nominale del generatore di corrente, ma dipende anche dal carico; infatti
da cui si vede che più il rapporto RL /R tende a zero, più la corrente attraverso il carico tende a I0 (il caso di generatore di corrente ideale prevede infatti R infinita).
Alcuni circuiti in grado di realizzare “buoni” generatori di corrente saranno studiati nel seguito (vedi la parte sui current mirror).
|
Figura 16 Linearizzazione di un generatore reale di corrente |
8.3 Resistore reale
Nel caso dei metalli la relazione

è vera con ottima approssimazione fino a valori di tensione e corrente molto elevati, fino a quando cioè la potenza dissipata nel resistore per effetto Joule è tale da introdurre deviazioni dalla linearità (verificabili sperimentalmente).
In pratica la tecnologia di costruzione dei resistori offre notevoli possibilità per formare resistori di proprietà più o meno vicine a quelle ideali.
Resistori a filo metallico
Si avvolge su un supporto isolante un filo, di sezione S e lunghezza L, costituito da un metallo o da una lega metallica di resistività nota, ρ.
In questo caso
Difetto: presenza di fenomeni induttivi
Resistori a film sottile
Viene depositato un sottile film metallico (per evaporazione termica o per sputtering) su un supporto isolante (ceramica, vetro, silicio ossidato)
Vantaggio: assenza di fenomeni induttivi
Svantaggio: scarsa riproducibilità nei valori di R
Resistori sinterizzati
Si comprimono grani di sostanze non metalliche (grani di carbone per esempio) fino a formare cilindretti di dimensioni volute.
Svantaggio: dispersione dei valori
Resistori integrati
Possono essere costruiti, in forma integrata tramite la tecnica di impiantazione su silicio, resistori integrati sepolti, molto utilizzati nei circuiti integrati.
Svantaggio: sono realizzabili valori di R inferiori a qualche decina di kΩ a causa degli alti costi del silicio.
Resistenza nominale e tolleranza dei resistori
Il valore nominale della resistenza e la tolleranza di un resistore possono essere decifrati tramite un codice a colori stampato, a bande, sul corpo cilindrico del resistore.
L’ultima banda indica la tolleranza del resistore; il codice a colori utilizzato per le più comuni tolleranze è indicato nella seguente tabella
Colore |
Tolleranza |
Argento |
10% |
Oro |
5% |
Rosso |
2% |
Marrone |
1% |
Per le resistenze con tolleranze peggiori di 1% si utilizza un codice a 4 bande; la quarta banda identifica la tolleranza, mentre, indicando con nkil numero corrispondente alla banda k-esima (la corrispondenza tra numeri e colori è indicata nella tabella sottostante) il valore della resistenza nominale è dato da

Per le cosiddette resistenze di precisione (un nome migliore sarebbe resistenze accurate) la tolleranza può essere molto inferiore (1%, 0.1% e 0.01%) e sono quindi specificate più cifre; ad esempio per resistenza con tolleranza 1% si ha

Il codice a colori è indicato nella seguente tabella:
Numero |
Colore |
-2 |
Grigio |
-1 |
Oro |
0 |
Nero |
1 |
Marrone |
2 |
Rosso |
3 |
Arancione |
4 |
Giallo |
5 |
Verde |
6 |
Blu |
7 |
Viola |
8 |
Grigio |
9 |
Bianco |
Ad esempio il resistore
[rosso (2) - giallo (4) – arancione (3) – argento (10%)] ha una resistenza nominale da 24kΩ e una tolleranza del 10%
I numeri negativi sono necessari per rappresentare valori bassi di resistenza; ad esempio il resistore
[marrone(1) – nero (0) – oro (-1) – argento (10%)] ha una resistenza nominale da 1Ω e una tolleranza del 10%
Il costruttore fornisce anche altre caratteristiche dei resistori.
- la variazione di R con la temperatura
- la massima potenza dissipabile per effetto Joule (da frazioni di W a qualche kW)
- i valori disponibili per ciascun tipo di resistore (normalmente da frazioni di Ω a centinaia di MΩ
Un circuito equivalente per un resistore reale è mostrato in figura 17. Gli elementi induttore (di valore L) e condensatore (di valore C) intervengono in presenza di segnali variabili nel tempo e comunque in presenza di transitori.
|
Figura 17 Circuito equivalente di un resistore reale |

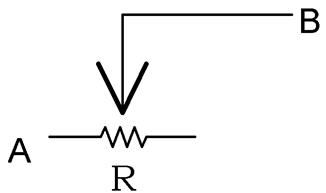
Reostato e potenziometro
Con l’aggiunta di un altro terminale (B) è possibile realizzare un dispositivo a resistenza variabile (reostato, vedi figura 18) utilizzato per far variare la corrente o un dispositivo in grado di cambiare la differenza di potenziale (potenziometro, vedi figura 19).
|
|
Figura 18 Reostato |
Figura 19 Potenziometro |

8.4 Condensatore reale
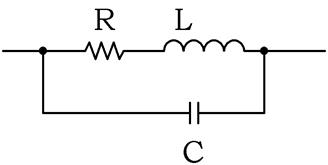
Uno dei possibili circuiti equivalenti di un condensatore reale è mostrato nella figura 18
|
Figura 20 Circuito equivalente di un condensatore reale |
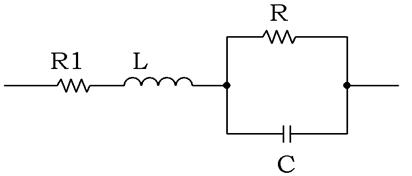
R1e L rappresentano valori della resistenza dei contatti e delle induttanze delle connessioni; R tiene conto del non perfetto isolamento (perdite) tra le armature del condensatore.
Quasi sempre gli effetti di R1e L sono trascurabili.
8.6 Induttore reale
Uno dei possibili circuiti equivalenti di un induttore reale è mostrato nella figura 21.
A titolo di esempio calcoliamo il coefficiente di autoinduzione di un solenoide (raggio r = 1cm e lunghezza l = 5cm) costituito da 100 spire poste nel vuoto.
Il modulo del vettore induzione magnetica B in questo caso vale

dove n è il numero di spire per unità di lunghezza, i è la corrente e μ0è la permeabilità magnetica nel vuoto,
Inoltre, ricordando che

ed indicando con N il numero totale di spire dell’induttore (si ha quindi N = nl), si trova

Questa relazione mostra che, fissato il numero di spire per unità di lunghezza, l’induttanza di un induttore è direttamente proporzionale all’altezza dell’induttore o, equivalentemente, è direttamente proporzionale al numero totale di spire (se infatti n è una costante, la proporzionalità tra L e l equivale alla proporzionalità tra L e nl).
Considerando i valori indicati nell’esempio si ottiene

|
Figura 21 Circuito equivalente di un induttore reale |
Per realizzare induttori si possono avvolgere dei fili di diametro variabile su un cilindro costituita da materiale a bassa od alta permeabilità magnetica; alternativamente si possono realizzare induttori a film sottile tramite la tecnologia della litografia e degli attacchi in umido o a secco dei materiali impiegati per la loro realizzazione.
E’ anche possibile realizzare degli induttori in forma virtuale, impiegando circuiti elettronici contenenti elementi attivi, condensatori e resistori. Di ciò verrà dato cenno nei corsi superiori.
Fonte: http://www.uniroma2.it/didattica/FondElettronica/deposito/03-Introduzione_ai_bipoli.doc
Sito web da visitare: http://www.uniroma2.it
Autore del testo: non indicato nel documento di origine
Nota : se siete l'autore del testo sopra indicato inviateci un e-mail con i vostri dati , dopo le opportune verifiche inseriremo i vostri dati o in base alla vostra eventuale richiesta rimuoveremo il testo.
Parola chiave google : Bipoli lineari e non lineari attivi e passivi tipo file : doc
Bipoli lineari e non lineari attivi e passivi
Visita la nostra pagina principale
Bipoli lineari e non lineari attivi e passivi
Termini d' uso e privacy