Ruote dentate
Ruote dentate
Questo sito utilizza cookie, anche di terze parti. Se vuoi saperne di più leggi la nostra Cookie Policy. Scorrendo questa pagina o cliccando qualunque suo elemento acconsenti all’uso dei cookie.I testi seguenti sono di proprietà dei rispettivi autori che ringraziamo per l'opportunità che ci danno di far conoscere gratuitamente a studenti , docenti e agli utenti del web i loro testi per sole finalità illustrative didattiche e scientifiche.
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
Ruote dentate
1. Richiami e considerazioni
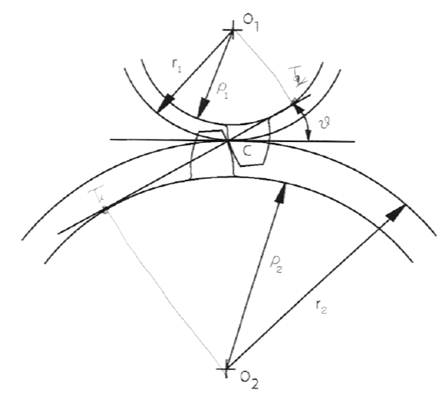
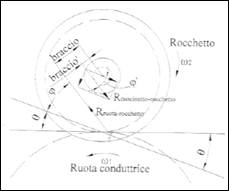
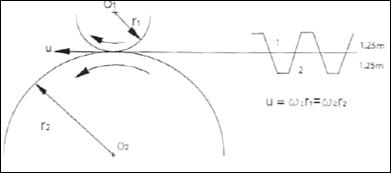
Profilatura Novikov-Circarc
Vediamo in questo caso che la linea di contatto è perpendicolare al
piano essendo la superficie di contatto una linea. Vediamo inoltre che serve una precisione elevata di produzione, difatti per la difficile realizzazione di profili perfettamente coincidenti vengono di fatto realizzati con curvature diverse.
Nel caso di curvature dello stesso segno, e considerando lo schiacciamento elastico, si ha una superficie di contatto maggiore rispetto ai profili ad evolvente.
La profilatura interna Novikov-Circarc ha quindi migliori condizioni di sollecitazione e maggiore durata dei denti (che arriva ad essere anche doppia rispetto a quella ad evolvente).
Classificazioni
La classificazione delle ruote dentate può essere fatta considerando l'orientamento rispettivo degli assi delle due ruote, si hanno ruote:
- assi paralleli: hanno un rotolamento di tipo piano e le loro superfici primitive sono cilindriche;
- assi concorrenti: il rotolamento è sferico e le superfici primitive sono coniche;
- assi sghembi: si ha rotolamento di una ruota rispetto all'altra e strisciamento lungo l'asse di istantanea rotazione.
Ruote dentate ad assi paralleli
In questi casi solitamente si usa una profilatura ad evolvente di cerchio, se gli assi sono:
- concorrenti: la profilatura ha solo alcune proprietà della profilatura ad evolvente di cerchio;
- sghembi: la profilatura è ad evolvente di cerchio solo casualmente.
I vantaggi di questa profilatura sono:
- insensibilità agli errori di realizzazione dell'interasse nei limiti consentiti dal gioco, se aumenta l'interasse a causa dell'usura si una aumenti del gioco tra i denti e diminuisce quindi la superficie dei denti stessi che sono interessati alla trasmissione.
- facilità di taglio per ruote interne ed esterne.
Generalmente l'angolo di pressione θ è pari a 20°, si usava anche angoli inferiori e ancora oggi si usano valori compresi tra 22 e 30 gradi per casi molto particolari.
Se quest'angolo aumenta si ha che:
- il dente si irrobustisce alla base;
- il numero di denti minimi diminuisce;
- diminuisce anche la sezione di imbocco (evidenziato in rosso)
L'angolo di incidenza θi è generalmente diverso da θ e si ha che si eguagliano solo in un particolare istante. Si ha infine che se aumenta l'interasse allora aumenterà anche l'angolo di funzionamento θ
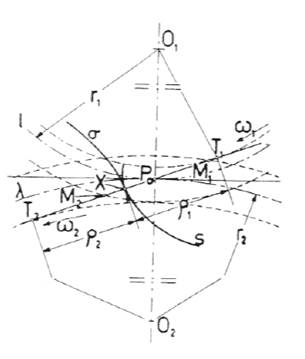
Strisciamenti specifici
Si consideri l'Ipotesi del Reye secondo la quale il volume di materiale asportato per usura è proporzionale al lavoro consumato per attrito con:

l'espressione uguaglia il volume di materiale asportato per attrito, se viene applicata ai profili in contatto di una coppia di ruote dentate si ha, definiti:
- N la pressione normale che si esercita tra le superfici lungo la generatrice l;
- u(s,σ) le velocità tangenziali dei due profili nel punto di contatto;
- k(s,σ) i coefficienti di proporzionalità legati al materiale con cui sono fatte le ruote.
Si può scrivere che:
 è uguale al lavoro consumato per attrito in un tempo dt;
è uguale al lavoro consumato per attrito in un tempo dt; sono i volumi asportati per attrito;
sono i volumi asportati per attrito;
Applicando l'Ipotesi del Reye e ricordando che si ricava che:
si ricava che:
questi spessori di materiale asportato sono direttamente proporzionali ai rispettivi strisciamenti specifici che cerchiamo adesso di quantificare più precisamente.
Si ha riscriviamo gli strisciamenti specifici:
riscriviamo gli strisciamenti specifici:
Si noti inoltre che possiamo esprimere , cioè la distanza tra i due punti è legata solo all'angolo di pressione ed ai raggi delle circonferenze base.
, cioè la distanza tra i due punti è legata solo all'angolo di pressione ed ai raggi delle circonferenze base.
E' quindi possibile esprimere gli strisciamenti specifici unicamente in funzione dei raggi di curvatura dei profili di evolvente nel punto di contatto.
Si ha di solito che gli strisciamenti specifici sono maggiori sempre sulla ruota più piccola.
Esiste anche un metodo grafico per la determinazione degli strisciamenti specifici. Considerati uno dei due organi, lo strisciamento massimo al piede dei denti può essere determinato essendo noti l'angolo di pressione α, il rapporto dove:
dove:
- z' è il numero di denti dell'elemento coniugato,
- y' è l'addendum ridotto dell'elemento coniugato, cioè il rapporto fra addendum e modulo di funzionamento.
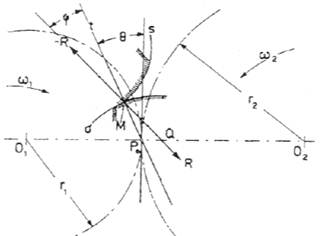
2. L'impuntamento
 .
.
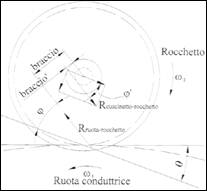
Quindi le forze sono inclinate di sulla tangente, quindi queste forze non passano più per il centro di istantanea rotazione. Nel caso in cui sia la ruota a essere motrice si ha che l'aumento dell'angolo porti la reazione del cuscinetto sull'albero del rocchetto dando luogo ad una coppia nulla o anche controversa alla velocità di rotazione ω2 .
sulla tangente, quindi queste forze non passano più per il centro di istantanea rotazione. Nel caso in cui sia la ruota a essere motrice si ha che l'aumento dell'angolo porti la reazione del cuscinetto sull'albero del rocchetto dando luogo ad una coppia nulla o anche controversa alla velocità di rotazione ω2 .
Si ha generalmente che per la coppia resistente Cr si ha:

si ha per l'equilibrio che se  e si ottiene cosi la condizione di impuntamento della trasmissione ruota-rocchetto.
e si ottiene cosi la condizione di impuntamento della trasmissione ruota-rocchetto.
Altri motivi per evitare rapporti di trasmissione alti sono gli ingombri della ruota, il numero dei denti che essa ha e quindi i costi di realizzazione e l'elevata sollecitazione a fatica dei denti del rocchetto che lavorano con frequenza più alta rispetto a quelli della ruota.
Si ha invece che se il rapporto di trasmissione è invariato ma col tempo peggiorano le condizioni di lubrificazione tra i denti delle ruote, cresce l'angolo di attrito φ si rischia di avere ugualmente l'impuntamento per via del cambiamento di direzione delle forza Rruota-rocchetto e Rrocchetto-ruota che ad un certo punto arrivano a giacere sulla stessa retta d'azione.
3. Il riduttore epicicloidale
Sono riduttori che servono ad ottenere rapporti di trasmissione molto bassi (fino a 1 : 10.000), è costituito da più ingranaggi detti satelliti che sono montati in un planetario il quale ruota intorno al pignone (detto “sole”), l'intero sistema viene alloggiato all'interno di una corona (che è la ruota dentata interna).

Uno degli elementi viene tenuto fermo, uno funziona come ingresso del moto e l'altro come uscita, il rapporto di trasmissione è determinato dal numero dei denti e da quale elemento sia tenuto fisso (tra la corona e il planetario).
Consideriamo il numero dei denti del sole S, dei satelliti P e della corona C, si ha che il rapporto tra:
- sole e satelliti è
 ;
; - satelliti e corona
 ;
; - quindi il rapporto tra sole corona è
 .
.
Se è fissa la corona il planetario è l'ingresso e il sole l'uscita quindi si ha un incremento di velocità di che è il massimo rapporto ottenibile da un sistema epicicloidale.
che è il massimo rapporto ottenibile da un sistema epicicloidale.
4. Atri cenni
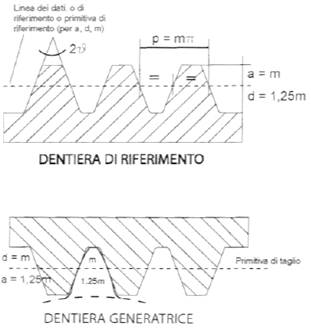 è una dentiera con diametro d e numero di denti pari a z entrambi infinitamente grandi, questa ruota segna il passaggio dalla dentatura esterna a quella interna ed è caratterizzata dal fatto che la primitiva di riferimento è usata per conteggiare l'addendum, il dedendum, il passo, ecc...
è una dentiera con diametro d e numero di denti pari a z entrambi infinitamente grandi, questa ruota segna il passaggio dalla dentatura esterna a quella interna ed è caratterizzata dal fatto che la primitiva di riferimento è usata per conteggiare l'addendum, il dedendum, il passo, ecc...
Dentiera generatrice: è la complementare alla dentiera di riferimento, la caratteristica principale è che il passo è sempre lo stesso lungo il fianco dei denti, essendo questi alternativamente paralleli tra loro, varia solo la ripartizione tra la lunghezza del pieno e del vuoto.
Numero minimo di denti: numero di denti al di sotto del quale si ha interferenza di taglio, si consideri una dentiera con addendum pari a m (cioè senza smusso al vertice), per evitare l'interferenza si dovrà avere:

se l'utensile è a spigolo vivo la zmin sarà maggiore:
 .
.
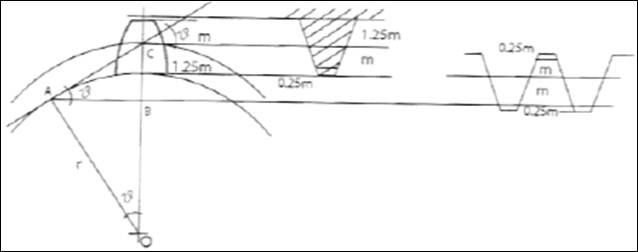
 .
.
La linea dei dati coincide con la tangente alle primitive cinematiche, e nota la velocità u della dentiera si ricava anche la velocità angolare con cui deve essere fatta girare la ruota .
.
Il taglio dei due profili avviene in pratica come inviluppo di una serie di tangenti (che sono in realtà i fianchi dei denti della dentiera fantasma) e si ha che .
.
E' opportuno notare che se la ruota e il pignone hanno diametri molto diversi, il pignone, essendo quello più piccolo, viene sottoposto a una pressione specifica maggiore sottoponendolo a maggiore usura e in generale a sollecitazioni maggiori (anche 5 volte maggiori rispetto alla ruota).
Dentature corrette: a volte si rende necessario minimizzare alcuni inconvenienti, tra cui quello appena citato, si può per questo spostare leggermente la dentiera fantasma di un valore , cioè si trasla la linea dei dati di una certa quantità rispetto alla tangente alle primitive cinematiche. Si può fare in vari modi:
, cioè si trasla la linea dei dati di una certa quantità rispetto alla tangente alle primitive cinematiche. Si può fare in vari modi:
- spostamento simmetrico: s è uguale per le due ruote;
- spostamento asimmetrico: s è diverso in modulo e contrario di segno per le due ruote;
- spostamento nullo: per una delle due ruote;
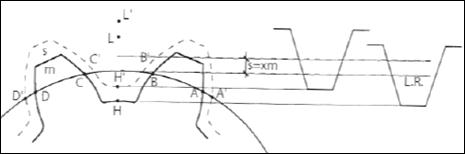
La differenza nel taglio dei profili sarà che si avrà una dentatura con lo stesso passo di prima ma con vuoti diversi dai pieni.
Facciamo un confronto.
Senza spostamento |
Con spostamento |
AB = BC Pieno = Vuoto Altezza = HL |
A'B' > B'C' Pieno > Vuoto Altezza H'L < HL |
A causa della minore altezza del dente vediamo che è necessario partire con un tondo di diametro diverso, dato da e si ottiene che il pieno del dente è più ampio.
e si ottiene che il pieno del dente è più ampio.
Nel caso poi in cui fosse necessario mantenere lo stesso interasse serve adeguare lo spostamento di entrambe le ruote, quasi sempre i rocchetti hanno spostamenti positivi per conferire loro maggiore robustezza a spese della condotta alla quale si attribuisce un s negativo.
Solitamente non serve dare alla condotta uno spostamento uguale e opposto rispetto a quello usato per il rocchetto ma lo si usa inferiore in valore per evitare di indebolire i denti della condotta. E' importante piuttosto stare attenti nel dare un valore di spostamento troppo elevato a non avere interferenza, abbiamo visto che:

vediamo che in una coppia di ruote dentate con spostamento dei cerchi uguali e contrari fra loro si evita l'interferenza di taglio alla base del dente se .
.
Conferendo un piccolo intaglio alla base del dente si evita l'accoppiamento in corrispondenza della radice dell'evolvente dove lo strisciamento è maggiore, in tal caso si ammette un numero di denti minimo inferiore dato da .
.
Ci sono altri casi particolari, ad esempio a volte è necessario irrobustire solo il pignone senza toccare la ruota, in tal caso si da uno spostamento s+ al pignone. Oppure occorre diminuire il valore dell'interasse in tal caso si da uno s+ a entrambe le ruote.
Il calcolo a resistenza
Per dimensionare opportunamente le ruote serve stabilire le sollecitazioni alle quali dovranno resistere, per questo si considerano le possibili avarie delle ruote:
- Rottura al piede del dente: la rottura inizia sempre dalla parte tesa e si propaga fino alla parte opposta, ha le caratteristiche di una rottura a fatica, è dovuta di solito a:
- sollecitazioni di volume dovute a un carico eccessivo rispetto al limite di fatica e di solito si manifestano durante l'imbocco,
- numero di cicli maggiore del previsto,
- cattivo proporzionamento
serve porre particolare attenzione a:
- tipo di materiale,
- trattamento termico che viene conferito per maggiore durezza superficiale,
- rigatura del raccordo del dente che deve essere molato (con un aumento dei costi).
- Danneggiamento delle superfici: durante il contatto tra le superfici dei denti lo schiacciamento è accompagnato da strisciamenti e si danneggiano le superfici per:
- butteratura: si manifesta nella zona del dente dove si ha quasi solo schiacciamento dove l'olio presente tende ad entrare nelle crinature e a scalzare il materiale fino a staccarlo;
- striature: dovuto alla presenza dell'eccesso di pressione e strisciamento.
- Eccessive velocità di strisciamento (prodotto pV): quando la velocità di strisciamento è troppo alta, il prodotto pv aumenta e la temperatura dell'olio è alta, il coefficiente di attrito è invece basso per cui l'olio è scacciato dai denti i cui denti poi entrano in contatto, si scaldano e fondono, questo comporta un reciproco distacco di materiale saldato.
Vediamo che le prime due cause di avaria non dipendono dalla velocità di strisciamento, mentre la terza ne dipende fortemente. E' possibile effettuare tre verifiche per questi tipi di avaria:
- verifica a flessione;
- verifica della pressione massima superficiale;
- verifica termica.
3. Analisi strutturale di Elementi di macchine: valore del modulo elastico
Consideriamo il legame tra le caratteristiche elastiche di un elementi di macchine ed il suo comportamento strutturale, solitamente nel calcolo analitico o numerico del modulo di Young del materiale si usa un valore di riferimento costante nel materiale che non tiene conto di eventuali trattamenti termici, chimici o meccanici.
Solitamente, esso risulta minore (mediamente del 20%) rispetto a quello posseduto dal materiale inizialmente (allo stato ricotto), quindi il comportamento strutturale del sistema è diverso da quello previsto nei calcoli, infatti se il valore di E considerato è maggiore di quello reale, risulteranno nei calcoli deformazioni minori di quelle che si avranno nella realtà. E' facile capire come questo possa essere disastroso nel dimensionamento di una macchina.
Le cause principali che provocano una variazione del modulo elastico sono (esclusa la dipendenza ben nota del modulo di Young dalla temperatura):
- Composizione del materiale: per acciai con lievi tenori di carbonio, cromo, silicio o manganese si ha che il ΔE può arrivare anche al 16% .
- Trattamenti: ci sono acciai ricotti che se sono sottoposti a carburazione, tempra o nitrurazione soffrono diminuzioni di E di circa il 7% .
- Stato di sollecitazione: sappiamo che il modulo elastico varia con lo stato di sollecitazione, basta ricordare la prova di tensione unificata. E' però diverso il comportamento di un materiale sottoposto a una sollecitazione di tipo idrostatico, in tal caso, all'aumento della sollecitazione idrostatica si ha un aumento di E.
- Influenza di campi di radiazione neutroniche: ancora in fase di approfondimento.
Ora esaminiamo come questo possa influenzare la progettazione di macchine in modo tale da tenere conto di queste possibili variazioni. Consideriamo, per il loro uso preponderante nella produzione meccanica, a ghise e acciai di cui consideriamo il diagramma Sforzo-Deformazione.
Vediamo la differenza tra i tratti iniziali di un acciaio ricotto e una ghisa grigia lamellare, sappiamo e infatti la ghisa considerata è un materiale duro e fragile per via della graffite presente nella matrice di ferrite sotto forma di lamelle sottili e appuntite che conferisce al materiale la sua durezza ma al cui apice si ha una concentrazione delle tensioni.
e infatti la ghisa considerata è un materiale duro e fragile per via della graffite presente nella matrice di ferrite sotto forma di lamelle sottili e appuntite che conferisce al materiale la sua durezza ma al cui apice si ha una concentrazione delle tensioni.
Vediamo infatti che la ghisa si rompe prima dell'acciaio ma raggiunge valore di deformazione elastica maggiori.
In campo elastico la ghisa, a parità di tensione, si deforma più dell'acciaio nonostante abbia un modulo elastico inferiore.
E' importante notare come l'acciaio trattato (ad esempio, sottoposto a cementazione per aumentarne la durezza) presenta un valore di deformazione a rottura maggiore di quello non trattato, pur continuando ad essere meno elastico della ghisa.
Difatti il trattamento delle superfici di un pezzo è voluto proprio per aumentarne le caratteristiche di elasticità delle asperità superficiali dei due elementi, in questo modo queste asperità all'entrare in contatto si adattano in modo meno brutale per il materiale che le circonda.
E' utile, per capire l'entità della variazione del modulo elastico, sottoporre due lastre geometricamente uguali (una di acciaio trattato, l'altra di acciaio non trattato) a una prova di flessione (con un estremità fissata e il carico applicato all'estremità opposta) → PAG. 65 a 71 delle dispense.
E' ovvio che non è possibile procedere ad una tabellazione dei moduli elastici di tutta la gamma di materiali potenzialmente utili alla costruzione di componenti meccanici, né in funzione della loro composizione (se non in modo vago e generico), né in funzione dello stato di tensione (ammette un infinità di casi), né in funzione degli eventuali trattamenti termo-chimici-meccanici.
Questo comporta che, nel corso della progettazione, l'ingegnere debba tenere conto della probabile variazione di modulo elastico e ne faccia debita valutazione.
3. Ruote a denti dritti
Questo tipo di ruote è caratterizzato dal fatto che i denti si scambiano una forza che ha la direzione della retta d'azione, le condizioni di massima sollecitazione di flessione si verifica nel momento in cui la forza Fn è applicata alla sommità del dente. Se ρi è il raggio della ruota i e Mi la sua coppia si ha: .
.
Consideriamo che sia in presa una sola coppia di denti alla volta, quindi l'arco di azione coincide col passo:
COMPRESSIONE →
SFORZO APPLICATO →
Per cui si ha: .
.
Vediamo come il problema si riduce a individuare il rapporto per il quale la tensione applicata assume il valore massimo. Vengono usati vari metodi:
per il quale la tensione applicata assume il valore massimo. Vengono usati vari metodi:
- metodo delle parabole;
- metodo del cuneo;
- metodo di carattere generale.
Metodo delle parabole
Si pone si deve individuare quel valore di c corrispondente alla parabola più stretta interna a tutte le altre e tangente al profilo del dente (senza superare il confine stesso del dente).
si deve individuare quel valore di c corrispondente alla parabola più stretta interna a tutte le altre e tangente al profilo del dente (senza superare il confine stesso del dente).
Metodo del cuneo
In base all'unificazione tedesca DIN (approvata dall'ISO) il fattore di forma può essere individuato inserendo un cuneo con un angolo di 60° centrato col dente fino a farlo diventare tangente al profilo del dente. Questa sezione identifica quella con tensione massima.
L'errore che si commette per approssimazione viene corretto nei calcoli adottando vari coefficienti.
Metodo di carattere generale
Possiamo scrivere che .
.
Se poniamo , otteniamo l'espressione della tensione sotto forma adimensionale, in questo modo si evidenzia il fatto che ruote con lo stesso numero di denti e stesso angolo di pressione hanno di conseguenza lo stesso valore y indipendentemente da m (cioè indipendentemente dalle sue dimensioni, come se fosse in scala). Il calcolo viene ridotto quindi a trovare il valore del fattore di forma y, chiamato cosi perché dipende dalla sola forma una volta fissati il numero di denti e l'angolo di pressione.
, otteniamo l'espressione della tensione sotto forma adimensionale, in questo modo si evidenzia il fatto che ruote con lo stesso numero di denti e stesso angolo di pressione hanno di conseguenza lo stesso valore y indipendentemente da m (cioè indipendentemente dalle sue dimensioni, come se fosse in scala). Il calcolo viene ridotto quindi a trovare il valore del fattore di forma y, chiamato cosi perché dipende dalla sola forma una volta fissati il numero di denti e l'angolo di pressione.
Nel caso di dentature con spostamento si ha che , nel caso precedente è conveniente tabellare i valori di y in funzione di z scelto un opportuno θ, ma in questo caso si preferisce tracciare un grafico.
, nel caso precedente è conveniente tabellare i valori di y in funzione di z scelto un opportuno θ, ma in questo caso si preferisce tracciare un grafico.
L'espressione della tensione viene ricavata considerando una sola coppia di denti in presa, in realtà per la continuità della trasmissione occorre che le coppie di denti in presa siano più di una. Si definisce a questo scopo un rapporto trasversale di ricoprimento:  .
.
Solitamente , questo significa che si ha 1 o 2 coppie in presa, si ha chiaramente che il carico viene suddiviso fra le due coppie di denti in maniera diversa l'una dall'altra ma per semplificare i calcoli si accetta di considerare il carico equamente diviso. Possiamo scrivere per più coppie di denti in presa:
, questo significa che si ha 1 o 2 coppie in presa, si ha chiaramente che il carico viene suddiviso fra le due coppie di denti in maniera diversa l'una dall'altra ma per semplificare i calcoli si accetta di considerare il carico equamente diviso. Possiamo scrivere per più coppie di denti in presa:
C'è da considerare che la forza Fc non è applicata staticamente, si applica quindi un coefficiente di maggiorazione per tenere conto del fenomeno della fatica: :
:
 tiene conto della concentrazione di tensione alla base del dente;
tiene conto della concentrazione di tensione alla base del dente; tiene conto degli effetti dinamici legati alla velocità V:
tiene conto degli effetti dinamici legati alla velocità V:
 per V > 12 m/s.
per V > 12 m/s.
Si ottiene cosi che: .
.
Verifica di Hertz
Si procede ad effettuare la verifica a pressione sul fianco dei denti, per questo ricorriamo alla formula di Hertz che considera due cilindri premuti tra loro a contatto lungo una generatrice, si esprime la pressione fra i due cilindri:
dove q è la forza per unità di lunghezza.
Si definisce , questa relazione vale per due cilindri di lunghezza infinita per i quali la tensione applicata è costante lungo il contatto ma viene applicata anche per cilindri di lunghezza finita trascurando gli effetti di bordo.
, questa relazione vale per due cilindri di lunghezza infinita per i quali la tensione applicata è costante lungo il contatto ma viene applicata anche per cilindri di lunghezza finita trascurando gli effetti di bordo.
E'1 e E'2 sono invece dati da: per cui possiamo scrivere:
per cui possiamo scrivere:
 .
.
Ricordiamo però che questo risultato è valido per due cilindri a contatto, si passa ora all'applicazione sulle ruote dentate.
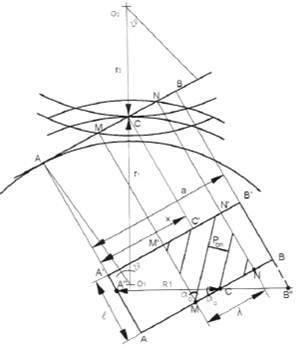
Verifica di Hertz: applicazione alle ruote dentate
Si ha in questo caso che il punto P si sposta da M a N (arco d'azione), in esso i raggi di curvatura dei due denti sono AP e BP.
Essendo i raggi dei due cilindri x e (a-x) si ha:

si ha che se i materiali sono uguali allora:

 .
.
Nell'istante in cui il contatto è in P, si ha la massima pressione sulla superficie di contatto fra i denti.
sulla superficie di contatto fra i denti.
La funzione .
.
Ancora una volta però si considera solo una coppia di denti a contatto, considerando la situazione più reale di 2 coppie di denti a contatto si ha che il carico viene ripartito a metà e il dente caricato in sommità, essendo più elastico, è caricato di meno di quello alla base che è più rigido.
E' possibile valutare graficamente l'andamento della pressione lungo la linea di contatto. Nel caso in cui si considerasse , si dovrebbe esaminare un grafico per ogni posizione di C sul tratto MN ma è un tipo di esame lungo che raramente viene fatto.
, si dovrebbe esaminare un grafico per ogni posizione di C sul tratto MN ma è un tipo di esame lungo che raramente viene fatto.
Per una formula più maneggevole si esprimono xc e (a-xc) in funzione dei raggi delle primitive:

da cui si ricava .
.
Per la verifica si deve avere .
.
4. Ruote a denti elicoidali
La differenza principale rispetto al caso di ruote a denti dritti è l'inclinazione di un angolo α (≈ 15°) della dentiera, il proporzionamento sarà uguale ma rispetto all'asse perpendicolare al dente e non alla ruota. Spesso si indica con l'angolo di inclinazione anche un numero (α = 15° 51') che indica il rapporto di trasmissione in base al quale viene definito l'angolo.
Siccome non si può avere una dentatrice che offra variazioni continue di velocità per la formazione contemporanea di pignone e ruota (servono due velocità diverse a seconda che si stia formando un dente del pignone o uno della ruota), si deve disporre di un assortimento di ruote che siano in grado di dare lo stesso angolo α per entrambe le ruote anche se di diametro diverso.
Formula di Lewis
Nelle ruote elicoidali le sezioni di uno stesso dente hanno diverse condizioni di contatto.
La Fn è la forza scambiata fra i denti in contatto perpendicolarmente alle superfici ed è ruotata di α rispetto al piano perpendicolare all'asse della ruota e di θ rispetto al piano comune tangente ai cilindri primitivi.
Possiamo dare i valori delle varie forze in funzione della forza Fn :
 ;
; ;
; è la spinta assiale sui cuscinetti;
è la spinta assiale sui cuscinetti; è la forza che genera la coppia.
è la forza che genera la coppia.
Si ha l'espressione della tensione di flessione applicata al dente per i denti dritti: , anche il passo è misurato perpendicolarmente al dente.
, anche il passo è misurato perpendicolarmente al dente.
Fattore di forma
Si hanno due possibilità, la prima consiste nel sezionare il cilindro primitivo con un piano perpendicolare all'asse del dente, si ottengono cosi le sezioni normali dei denti nei quali si può trovare il fattore di forma come nel caso dei denti dritti (metodo delle parabole o del cono di semi apertura tedesco).
Nel secondo caso si ammette che il fattore di forma y per denti elicoidali sia pari a quello di una ruota a denti dritti ma di raggio primitivo ) della ruota elicoidale. In questo modo è possibile usare tabelle e grafici per ruote a denti dritti anche per ruote a denti elicoidali.
) della ruota elicoidale. In questo modo è possibile usare tabelle e grafici per ruote a denti dritti anche per ruote a denti elicoidali.
La determinazione del numero di denti è necessaria per avere il valore finale di y, si consideri z' il numero di denti della ruota fittizia, si ha che:

Infine si ha, per la lunghezza .
.
Possiamo scrivere cosi che:
Posto .
.
Verifica di Hertz
Per denti dritti abbiamo visto l'espressione della formula di Hertz: , nelle ruote a denti elicoidali si hanno i punti di tangenza della retta d'azione con le circonferenze base. Ribaltando la sezione vediamo che il contatto avviene lungo linee inclinate di α0 sulla normale alla retta d'azione.
, nelle ruote a denti elicoidali si hanno i punti di tangenza della retta d'azione con le circonferenze base. Ribaltando la sezione vediamo che il contatto avviene lungo linee inclinate di α0 sulla normale alla retta d'azione.
I raggi di curvatura diventano, come possiamo vedere nella figura a pagina seguente:
L'espressione originale della formula di Hertz era: , per cui dobbiamo ricavare l'espressione della formula di Hertz con le nuove espressioni dei raggi di curvatura:
, per cui dobbiamo ricavare l'espressione della formula di Hertz con le nuove espressioni dei raggi di curvatura:
Ci dobbiamo ricavare la forza per unità di lunghezza

infine il carico totale è dato dalla forza periferica:

inserendo questa espressione nell'eguaglianza di q e semplificando rispetto alla condizione media nel punto C si ottiene l'espressione:

Dimensionamento della ruota
In realtà per il dimensionamento viene usata la stessa formula sotto una forma più conveniente:

La sollecitazione descritta dalla formula di Hertz è simile alla sollecitazione presente nei cuscinetti volventi senza lo strisciamento. Nel diagramma σ-N (dove N è il numeri di cicli) la curva che individua il limite di resistenza a tempo ha l'andamento indicato in figura.
Vediamo quindi che anche in presenza di una sollecitazione bassa la crisi può avvenire per un valore del numero di cicli troppo alto, da cui la relazione:

nel caso del grafico y=6 e σH0 è il valore della tensione ammissibile corrispondente a N0 = 107 cicli. Si ha che 
- h è il numero di giri;
- n1 è il numero di giri al minuto del pignone.
Si ha quindi che:
sostituendo nella relazione finale di
questi appunti sono passibili di errori!!!
Fonte: http://raid996.altervista.org/costruzioni.odt
Autore del testo: Raid996
Elaborato da:
Renato Campus Giraldo
Supporto didattico:
Parola chiave google : Ruote dentate tipo file : doc
Visita la nostra pagina principale
Ruote dentate
Termini d' uso e privacy