Motore asincrono trifase
Motore asincrono trifase
I riassunti, le citazioni e i testi contenuti in questa pagina sono utilizzati per sole finalità illustrative didattiche e scientifiche e vengono forniti gratuitamente agli utenti.
PROGETTAZIONE MOTORE ASINCRONO TRIFASE
Supponiamo di voler progettare un M.A.T. con rotore in corto circuito a semplice gabbia fusa in alluminio, della potenza di 736W = 1CV a 4 poli.
Calcolare un motore significa predeterminare le dimensioni di tutte le sue parti in modo che sviluppi la coppia corrispondente alla sua potenza nominale, alla velocità di regime e in modo che le temperature assunte dalle sue parti non siano di pregiudizio all’integrità dei materiali di cui sono costituite.
Inoltre nel calcolo devono essere rispettate delle condizioni basilari come una buona pratica di esercizio, un buon rendimento, fattore di potenza e corrente a vuoto.
Va riposta particolare attenzione nel calcolo della corrente a vuoto dato che determina le perdite nel ferro e nel momento iniziale il ferro oppone una certa inerzia alla variazione del campo magnetico a cui è sottoposto.
Un elemento fondamentale del motore è il traferro poiché costituisce la parte che richiede la maggiore magnetizzazione (avendo l’aria una permeabilità bassissima rispetto al ferro) quindi un piccolo traferro rende bassa la corrente a vuoto e alto il fattore di potenza.
Parte da non sottovalutare nella progettazione di un motore è il calcolo delle dimensioni che dovranno quindi corrispondere a determinate sollecitazioni magnetiche (induzione massima nelle varie parti del circuito magnetico) ed elettriche (densità di corrente negli avvolgimenti di statore e di rotore), nonché consentire un sufficiente smaltimento di calore; questo ultimo dipende oltre che dalle dimensioni anche dal corretto disegno.
PERDITE NEL MOTORE
Come in tutte le macchine elettriche rotanti, si hanno nei motori delle perdite:
- Perdite nel ferro,
- Perdite negli avvolgimenti,
- Perdite meccaniche,
- Perdite addizionali
- PERDITE NEL FERRO
Le perdite nel ferro si hanno più specificatamente nel nucleo magnetico di statore:
esse sono causate dalle correnti parassite che variano con il quadrato dello spessore del lamierino e con il quadrato della frequenza e sono costituite dalle perdite per isteresi magnetica che si manifestano nel nucleo di statore.
PC = KC * B2M * f 2 * d 2 (W/Kg)
Le perdite per isteresi aumentano all’incirca con il quadrato dell’ induzione e con la frequenza.
Pi = K i * BM1.6 * f (W/Kg)
Nel nucleo di rotore le perdite sono minime perché nel funzionamento normale la frequenza della tensione rotorica è piccolissima, essendo proporzionale allo scorrimento, perciò si possono trascurare.
Se il nucleo fosse costituito da ferro massiccio le correnti indotte (correnti parassite) in esso produrrebbero alte perdite, le quali darebbero luogo a un forte riscaldamento nel ferro.
Per limitare queste perdite lo statore viene laminato, cioè composto da tanti sottili lamierini di uno spessore di circa 0.5 mm isolati tra loro.
Il ferro oppone una certa inerzia alla variazione del campo magnetico a cui è sottoposto per cui i valori dell’induzione seguono con un certo ritardo i valori del campo magnetico. Il passaggio dell’energia dallo stato elettrico a quello magnetico avviene con una certa perdita per isteresi.
- PERDITE OHMICHE NEGLI AVVOLGIMENTI
Le perdite negli avvolgimenti si dividono in due parti:
- Perdite negli avvolgimenti statorici
- Perdite negli avvolgimenti rotorici
Le perdite joule negli avvolgimenti di statore sono dovute alla corrente che assorbe il motore e dalla resistenza R1 di fase e sono date dalla formula: Pj1=3R1*(I1)2.
Le perdite nel rotore sono dovute dalla corrente indotta negli avvolgimenti rotorici e data anch’esse dalla formula: Pj2=3 R2*(I2)2.
- PERDITE MECCANICHE
Sono dovute agli attriti nei cuscinetti alla resistenza dell’aria sulla ventola di raffreddamento.
RENDIMENTO
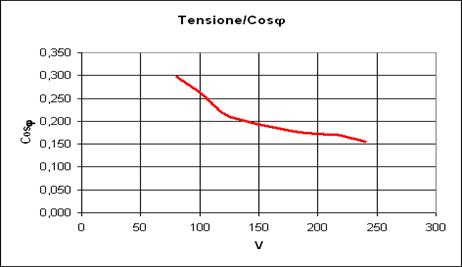
I motori asincroni presentano un fattore di potenza relativamente basso, specialmente ai piccoli carichi; essi infatti richiedono dalla linea di alimentazione oltre alla corrente attiva, che è proporzionale al carico, anche la corrente di magnetizzazione e quindi il fattore di potenza del motore risulta minore nel funzionamento a vuoto, potendo questo scendere fino a 0,2 – 0,3. Il fattore di potenza a pieno carico aumenta con l’aumentare della potenza nominale del motore. Un alto fattore di potenza è una delle più importanti qualità di un motore asincrono.
COPPIE
In un motore asincrono la coppia si manifesta come reazione dal campo prodotto delle correnti indotte nel rotore sul campo magnetico rotante induttore da coppia di un motore asincrono è pertanto proporzionale:
- Al prodotto del flusso risultante per l’intensità della corrente che circola nel rotore;
- Allo scorrimento .
Si può dire quindi che:
- Ad ogni coppia corrisponde una data corrente, qualunque sia il numero di giri;
- La coppia per ogni data corrente è indipendente dalla resistenza del rotore:
- In un determinato motore la coppia è proporzionale al quadrato della tensione di alimentazione.
Poiché nell’uso comune la parola “coppia” viene talvolta usata indifferentemente per indicare grandezze diverse, è bene precisare con le seguenti definizioni i diversi valori di coppia che si considerano nei motori, seguendo anche in questo, per quanto possibile, le norme CEI.
- COPPIA NOMINALE
È la coppia corrispondente alla potenza nominale e alla velocità sincrona. Quindi essa rappresenta il valore più alto di coppia che il motore può dare in servizio continuo rimanendo nei prescritti limiti di riscaldamento.
- COPPIA MASSIMA
Chiamata anche coppia di rovesciamento o coppia di cedimento, è la coppia che il motore, alimentato a tensione e frequenza nominali, può sopportare istantaneamente senza arrestarsi ne rallentare bruscamente. Il rapporto fra la coppia massima e la coppia nominale dà una misura della sovraccaricabilità del motore, che è uno dei maggiori pregi del motore asincrono.
- COPPIA DI SPUNTO
È il valore minimo della coppia sviluppata del motore a rotore bloccato nelle condizioni nominali di alimentazione.
Esso rappresenta cioè la coppia prodotta del motore quando questo è ancora fermo. All’avviamento si possono avere a seconda del genere di macchina valori di coppia resistente anche più elevati di quelli che si hanno in servizio normale. Nei motori con rotore avvolto con anelli d’avviamento, si può variare il valore della coppia di spunto, mediante l’inserzione di resistenze nel circuito del rotore; invece nei motori con rotore in cortocircuito la coppia di spunto è fissa e dipende particolarmente dalla forma e disposizione della gabbia del motore.
LO SCORRIMENTO
 Lo scorrimento è la velocità con la quale il rotore vede il campo magnetico rotante che taglia i conduttori di statore; questa è chiamata velocità di scorrimento s = n0-n
Lo scorrimento è la velocità con la quale il rotore vede il campo magnetico rotante che taglia i conduttori di statore; questa è chiamata velocità di scorrimento s = n0-n
n0
La velocità di scorrimento non può annullarsi: infatti, in tal caso, non si avrebbero più variazioni di flusso, nè tensioni indotte, nè correnti indotte e, in definitiva, nessuna coppia motrice. Poiché esistono pur sempre le perdite meccaniche, che devono essere vinte, si conclude che la velocità di rotore risulterà sempre minore di quella del campo. Nelle ordinarie condizioni di funzionamento, lo scorrimento è nell’ordine di qualche percento.
SCELTA DEL TIPO DI AVVOLGIMENTO DEL M.A.T.
Si sceglie un avvolgimento trifase embricato a passo intero
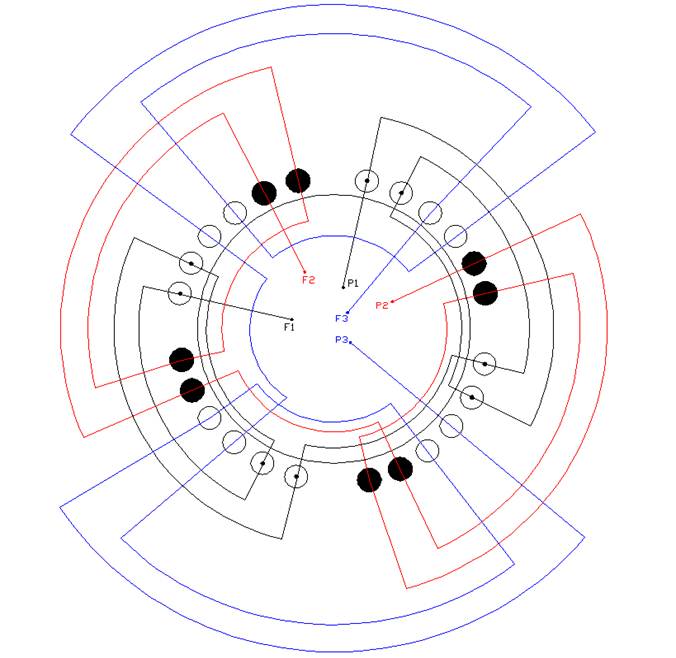
Lo schema di figura presenta un avvolgimento trifase 4 poli con 24 cave e 2 cave per polo e fase.
LE VARIE PARTI DEL MOTORE

Come possiamo notare nella figura sopra riportata, il motore si compone di diverse parti. Qui di seguito verranno descritte le singole parti.
LO STATORE

Sorretto dalla carcassa lo statore è realizzato in lamierini in genere di 0.5mm di spessore, verso il traferro vi sono cave uniformemente distribuite, di forma rettangolare aperte. Nelle cave vi sono alloggiati i conduttori dell’avvolgimento trifase.
 Dalla foto qui a sinistra si possono vedere gli avvolgimenti e si possono contare il numero di cave che nel nostro caso sono 24.
Dalla foto qui a sinistra si possono vedere gli avvolgimenti e si possono contare il numero di cave che nel nostro caso sono 24.
IL ROTORE

Il rotore rappresentato in figura è costituito anch’esso da un pacco di lamierini di ferro arricchiti di silicio, all’interno del quale passa l’albero di
rotazione e nella cui parte esterna sono disposte un certo numero di cave in cui sono allocati i conduttori che costituiscono l’avvolgimento di rotore. Generalmente, il numero delle cave di rotore è maggiore di quello di statore per evitare vibrazioni del motore dovute a variazioni ritmiche
del flusso magnetico al traferro (effetto sirena).

COPERCHIO
E’ la parte che chiude il motore e permette tramite il foro centrale l’uscita dell’albero del motore. Viene calettato al motore tramite quattro bulloni.
PROTEZIONE VENTOLA
 La protezione della ventola è utile per la salvaguardia dell’incolumità dell’operatore che sta lavorando sul motore.
La protezione della ventola è utile per la salvaguardia dell’incolumità dell’operatore che sta lavorando sul motore.
LA MORSETTIERA
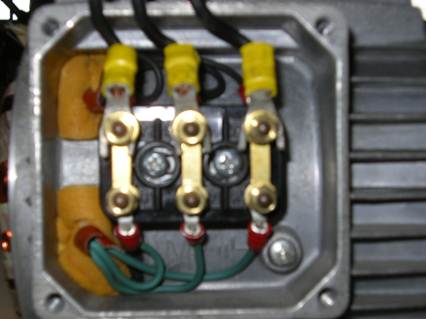
Come si vede dalla figura sopra riportata il collegamento della morsettiera del motore è a triangolo.
IL MOTORE COMPLETO
In queste tre foto si ha il motore completo visto da tre angolazioni diverse



Calcolo e dimensionamento di un motore asincrono trifase con potenza di 736W (1CV) con 4 poli e 2 cave per polo fase
Per il calcolo partiamo dalla formula DxL= f*p
 B
B
Che come altre formule e tavole si basano su coefficienti desunti da costruzioni che hanno dato buon risultato
D= diametro interno di statore (0,079m)
L= lunghezza del pacco magnetico (0,082m)
B induzione massima del traferro in Wb/
p= numero coppie di poli
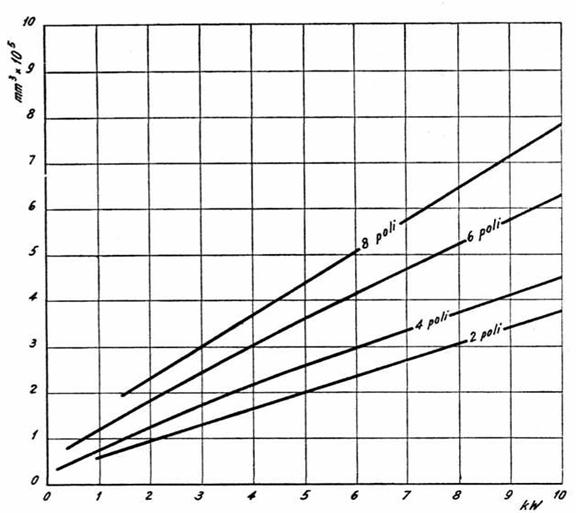
Il flusso f lo scegliamo in base alla seguente tabella N°1 che da le dimensioni fondamentali di un motore in relazione alla potenza ed al numero di poli
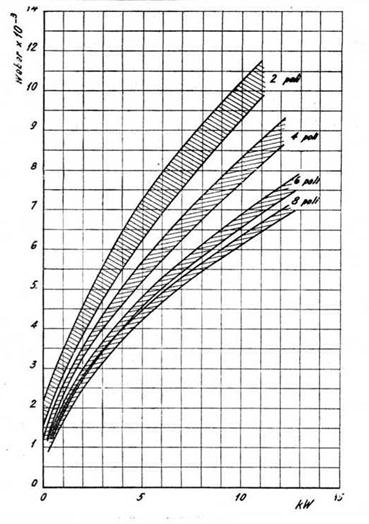
TAB.1
ricordando che l'induzione B dovrà rimanere nei limiti di 0,6-0,85 Wb/
f, scelti in corrispondenza di 0,736Kw, risulta essere 
Per trovare il numero di fili per fase si usa la seguente formula
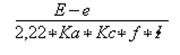 N=
N=
E= tensione di 1 fase
e= caduta di tensione di circa 5% di E
Ka= fattore di avvolgimento
Kc fattore di accorciamento ed avendo l'avvolgimento a passo interno si considera 1
f= frequenza in Hz
I= flusso in Wb
- si determina il valore di Ka in funzione del numero di cave per polo e fase utilizzando la seguente TavolaN°2
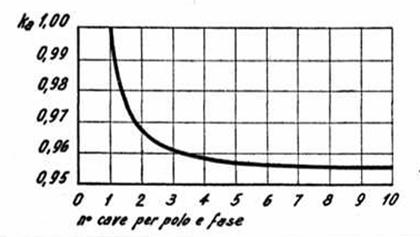
Tav.2
Avendo uno statore con 2 cave per polo e fase
Ka=0,966
N= =865 fili in serie per fase
Ora troviamo il valore dell'induzione B
B=
Possiamo dedurre che dal valore risultante l'induzione rimane entro i limiti prima stabiliti.
- In base alla Tabella N°1 calcoliamo il numero di cave di statore e di rotore
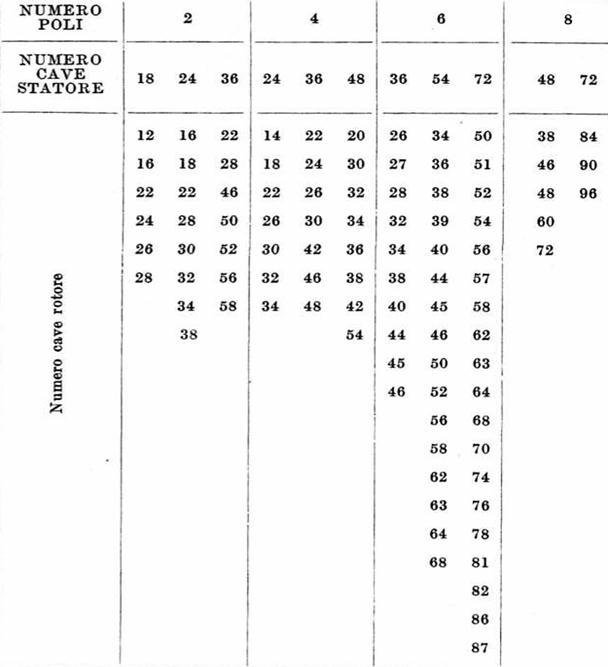 Tab.1
Tab.1
Z1= cave statore 24
Z2= cave rotore 30
- Dalla tavola n°4 si ricava il volume utile di rame in relazione alla potenza e il numero di poli
 Tav.4
Tav.4
 V1=
V1=
- Ora in base alla lunghezza del pacco magnetico e il numero delle cave otteniamo la superficie di rame alfa1 che trova posto in una cava di statore
 a1=
a1=
- Per trovare il numero di fili cava di statore si applica la seguente formula
 n1= fili per cava
n1= fili per cava
- Una volta calcolato il numero di fili per cava si trova la sua sezione S del filo
 S=
S=
- Dalla Tabella N°2 si prende un diametro del filo di 0,6
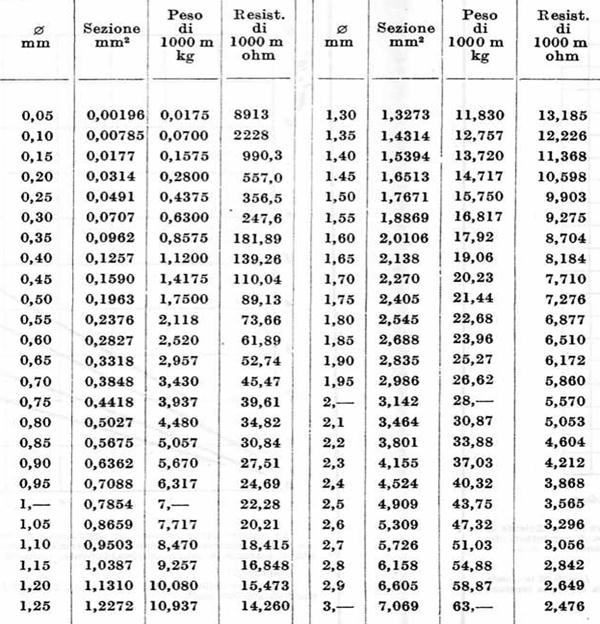 Tab.2
Tab.2
- Ora calcolo la sezione della cava di statore prendendo il coefficiente di riempimento Kr in funzione al diametro di conduttore impiegato dalla seguente TavolaN°5:
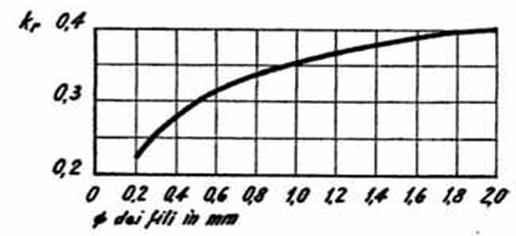 Tav.5
Tav.5
Kr=0,33
S=

S=
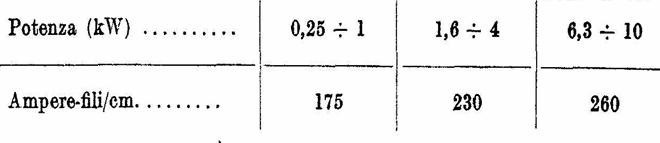
- Ora ricaviamo gli amper fili/cm

Siccome il motore è collegato a triangolo la corrente su ogni fase è
Quindi:

Amp fili/cm=
Il risultato ottenuto verificando dalla Tabella N°3 che da gli Ampere/fili rispetto a P è accettabile
Tab.3
- Scegliamo ora il traferro utilizzando la Tavola N°6 che permette il calcolo traferro in funzione del diametro di rotore.
Tav.6
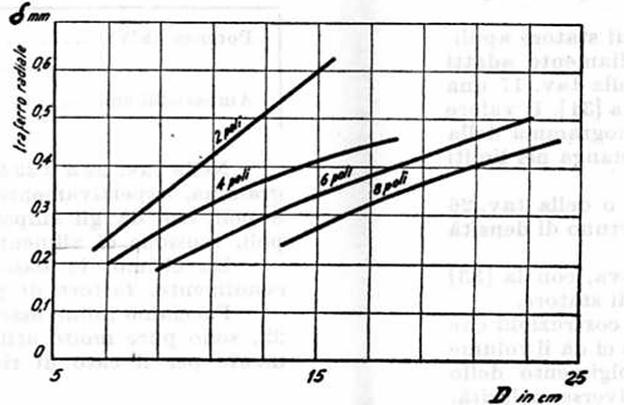
d =0,23
- Troviamo le perdite nel rame di statore calcolando prima la lunghezza del filo

L=
Una volta calcolata la lunghezza si calcola la resistenza del filo a temperatura di 20°C

R20=
- Ora si calcola la resistenza alla temperatura di 75°C
 R75= R20*
R75= R20*
- Calcolo delle potenze perse nel motore asincrono trifase
Pj1=3*R75*I2= 3*10,32*1,822=102,5W
- Perdite per ventilazione Pav
 Pav=
Pav=
- Perdite di potenza nel rotore
s=
Pj2=s*Pj2+s*P2+s*Pav= s*(P2+Pav)= Pj2*(1-s)
Pj2=
- Dalla TabellaN°4 si deduce la velocità effettiva di un motore da 736W 4 poli
Tab.4
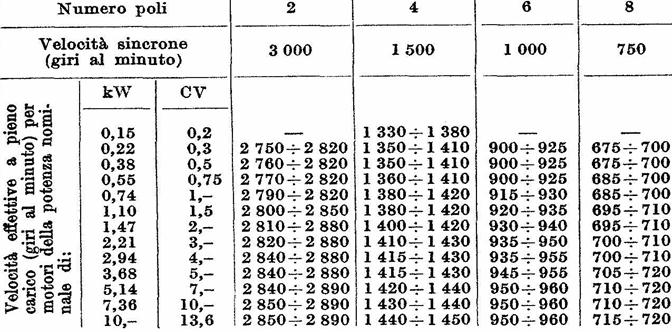
n1=1380-1420
Supponiamo N1=1400
 s= =
s= =

Pj2=
P0=  *220*2,02*0,169=130,1W
*220*2,02*0,169=130,1W
PFE= PO-PAV = 130,1-19,65 =110,45W
PA= PR+PAV+PJ2+P0 = 736+19,65+53,4+130,1=939,1W
Nel calcolo della Pa non sono state considerate le Padd perché sono trascurabili essendo il 5‰ di Po
h=  =0,78
=0,78
In base ai calcoli sovra riportati è stato realizzato il motore presentato nella tesina partendo da uno statore e da un rotore appartenenti all’officina di elettrotecnica. Gli avvolgimenti sono stati riavvolti da una ditta specializzata secondo le indicazioni da noi fornite in base allo studio teorico effettuato mantenendo lo stesso numero di spire secondo lo schema di avvolgimento qui illustrato.
Mediante le prove verifichiamo se il motore fornisce le prestazioni ed il rendimento ipotizzato dai calcoli teorici.
PROVA A VUOTO
La prova di funzionamento a vuoto è una delle prove previste per il collaudo del motori asincroni trifasi.
Tale prova permette di ottenere una prima visione d’insieme del motore e permette di verificare che non siano stati effettuati errori macroscopici nell’eventuale riavvolgimento.
La prova a vuoto ha infatti lo scopo di verificare la corretta esecuzione degli avvolgimenti (numero di spire), il valore del tra ferro tra statore e rotore , la funzionalità dei cuscinetti , l’isolamento e le perdite dei lamierini magnetici impiegati.
Durante la prova ,il motore ,viene istallato, fissato o eventualmente appoggiato su un piano in modo tale da consentire una corretta rotazione del motore e garantire la stabilità meccanica dello stesso.
Il motore viene alimentato attraverso la propria morsettiera da una linea trifase e a tensione variabile.
Durante la prova, iniziando da circa il 30-40% della tensione nominale,vengono rilevati i valori della tensione di alimentazione, la corrente assorbita, la potenza assorbita ed il numero di giri.
Dai dati di targa possiamo risalire, sebbene in modo grossolano, alla corrente a vuoto, che ci servirà per scegliere gli strumenti opportuni per la prova.
Abbiamo supposto un cosj e un rendimento di 0,7 e abbiamo ottenuto il valore della corrente nominale, il quale è simile a quella dei dati di targa.
Nel trasformatore la corrente a vuoto assume valori trascurabili, ma nel motore questo non accade a causa della presenza del traferro.
La corrente a vuoto assume valori tra 20% e il 40% della corrente nominale ( per piccoli motori anche valori più elevati) e in base al valore di tale corrente andremo a scegliere gli strumenti opportuni.
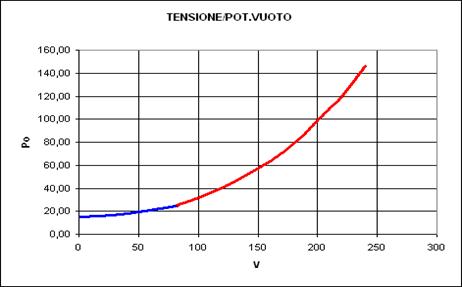
Per il calcolo delle perdite meccaniche, si fa ricorso al metodo grafico. Si disegna l’andamento di Pfe + Pm in funzione di Po.
Le perdite meccaniche rimarranno sempre all’incirca uguali, mentre le perdite nel ferro aumentano all’aumentare della tensione.
Pertanto estrapolando alla tensione uguale a 0 è possibile ricavare il valore delle sole perdite meccaniche.
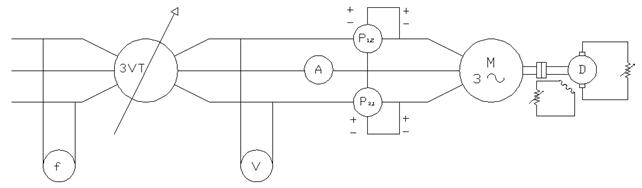
SCHEMA ELETTRICO
In questa prova abbiamo preferito collegare il motore a triangolo per evitare tensioni molto alte e pericolose e per avere una corrente più sostenuta in linea.
GLI STRUMENTI UTILIZZATI SONO:
- 1 Voltmetro analogico con portate: 200, 400V, 200 divisioni a fondo scala e classe di precisione 0.5. Il fondo scala dello strumento è stato portato ad una tensione di 400V dato che nella prova avevamo previsto una tensione massima di 240V.Lo strumento alla tensione nominale massima (400V) presenta una resistenza interna di 8.9 KW e un fattore di scala Kv=2.
- 1 Amperometro analogico con portata massima di 2,5 e 5 A e una classe di precisione di 0,5.L’amperometro viene scelto in base alla corrente a vuoto del motore che è il 30%,40% della corrente nominale. Da evidenziare che durante la prova è stata cambiata la portata amperometrica da 2,5 a 5A.
- 2 Wattmetri per misurare la potenza attraverso l’inserzione Aron. I due wattmetri vengono denominati P1,2 che è il ponte minore a basso cosj (0,3) con portata amperometrica da 2,5 a 5 A e una portata voltmetrica da 200 e 400V e 100 divisioni di fondo scala. L’ altro wattmetro utilizzato viene chiamato P3,2 ponte maggiore. Ha gli stessi dati del wattmetro prima descritto, cambia solo il cosj.
PANORAMICA DELLO SCHEMA ELETTRICO DI MONTAGGIO

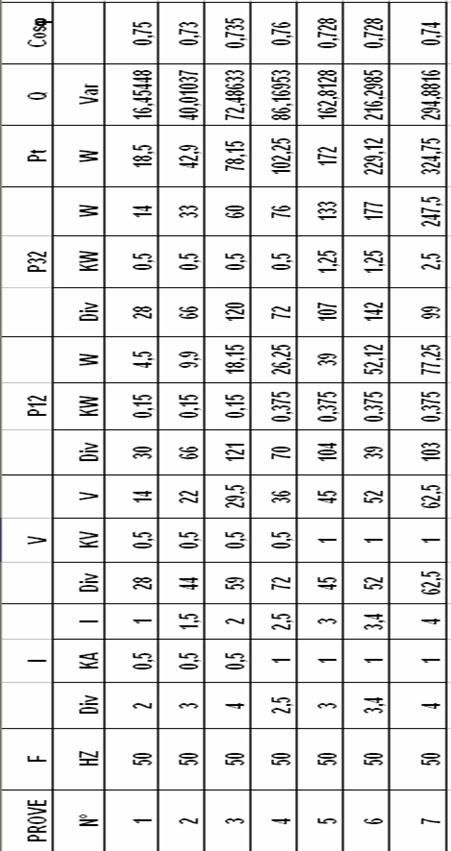
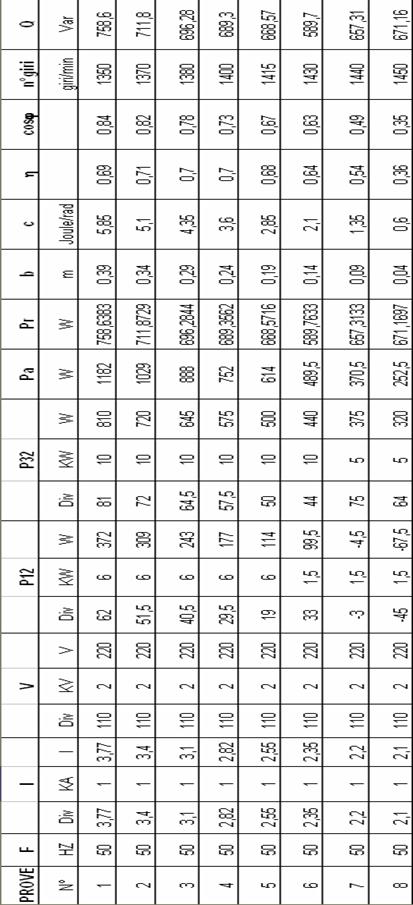
TABELLA DEI CALCOLI E RISULTATI
GRAFICI
Nel grafico sotto vengono illustrate in blu le perdite meccaniche che sono circa 18 W, che si ottengono prolungando la curva in rosso fino all’asse y delle Po
CONCLUSIONI
Lo scopo di questa prova è quello di determinare le perdite meccaniche, le perdite nel ferro e le perdite per effetto joule nello statore.
Dal risultato di queste perdite si può ricavare P0 che è uguale a PM+PFE+PjSTA.
Infine non sono da trascurare le perdite per effetto joule nello statore in quanto sono dovute alla corrente I0 pari al 30% 40% della corrente nominale.
PROVA DI CORTOCIRCUITO O ROTORE BLOCCATO
Questa prova viene fatta mantenendo il rotore bloccato, il che significa uno scorrimento pari a 1.
Questa prova consiste nella determinazione della potenza e della corrente che esso assorbe quando si alimenta il primario a frequenza nominale e a tensione ridotta.
Quest’ultima è chiamata tensione di cortocircuito ed è quella che serve per far assorbire al motore la corrente nominale di pieno carico(I1N).
Normalmente la tensione di alimentazione è pari al 20% 30% della tensione nominale.
Per l’esecuzione della prova si devono inserire sulla linea di alimentazione due wattmetri collegati con l’inserzione Aron, un amperometro e un voltmetro a valle.
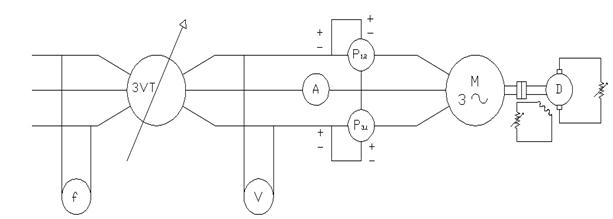
SCHEMA ELETTRICO
Gli strumenti usati sono quelli della prova precedente.
PANORAMICA DELLO SCHEMA ELETTRICO DI MONTAGGIO

TABELLA DEI CALCOLI E RISULTATI
GRAFICI
PROVA DINAMO FRENO
Questa prova serve per misurare la coppia sviluppata da un motore e la potenza sviluppata dalla macchina.
Si può fare questo tramite la conoscenza della velocità di rotazione, che può essere misurata in vari modi; nel nostro caso abbiamo utilizzato uno stroboscopio.
Il principio su cui si basa questa prova è quello di equilibrare il peso applicato ad un braccio di leva (C = P x b ).
Per attuare questa prova abbiamo calettato il motore ad una dinamo freno.
Quest’ultima è in pratica una normale dinamo la cui carcassa invece di essere fissata può oscillare intorno all’asse.
Su detta carcassa viene calettato un braccio sul quale si applicano dei pesi. La dinamo è chiusa su di un carico dissipativo (1128W) ed eroga l’energia prodotta dalla rotazione impressa.

A causa dell’azione delle forze elettromagnetiche tra rotore e statore della dinamo la carcassa tenderà a seguire la rotazione del rotore perché sollecitata da una coppia che coincide con quella sviluppata dal motore. la rotazione della carcassa viene impedita dal peso applicato sul braccio di leva, dalle condizioni di equilibrio del sistema oscillante si deduce la coppia e quindi la potenza prodotta dal motore.
SCHEMA ELETTRICO
Gli strumenti sono uguali a quelli delle prove precedenti con la sola aggiunta dello stroboscopio e della dinamo freno
STROBOSCOPIO

Gli stroboscopi moderni utilizzano una luce che lampeggia con la stessa frequenza del moto dell’ oggetto; si usano generalmente lampade a neon o a luminescenza, che vengono accese e spente mediante dispositivi meccanici o corrente alternata a frequenza variabile.
DINAMO FRENO

PANORAMICA DELLO SCHEMA ELETTRICO DI MONTAGGIO

TABELLA DEI CALCOLI E RISULTATI
GRAFICI
CONCLUSIONI
Dopo aver effettuato tutti i calcoli teorici e le varie prove pratiche sul motore, analizziamo e confrontiamo i risultati ottenuti.
Dai calcoli teorici risulta una potenza assorbita dal motore di 939 W e una Pr di 736 W a differenza delle prova pratica “dinamo freno” dove abbiamo una Pa di 1029 W e una Pr di 711,8 W .Questa differenza di potenza resa può essere confermata dalle perdite risultanti dalle prove eseguite;
come si vede le Pfe dai calcoli teorici risultano essere minori di quelle effettive.
Per quanto riguarda il rendimento si può notare appunto che nei calcoli teorici risulta essere maggiore di quello reale.
Fonte: http://www.saturatore.it/Elettronica/Motore%20asincrono%20trifase.doc
Autore del testo: non indicato nel documento di origine
Motore asincrono trifase
Visita la nostra pagina principale
Motore asincrono trifase
Termini d' uso e privacy