Trasduttori e dispositivi di misura
Trasduttori e dispositivi di misura
Questo sito utilizza cookie, anche di terze parti. Se vuoi saperne di più leggi la nostra Cookie Policy. Scorrendo questa pagina o cliccando qualunque suo elemento acconsenti all’uso dei cookie.I testi seguenti sono di proprietà dei rispettivi autori che ringraziamo per l'opportunità che ci danno di far conoscere gratuitamente a studenti , docenti e agli utenti del web i loro testi per sole finalità illustrative didattiche e scientifiche.
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
Trasduttori e dispositivi di misura
1.-Introduzione.
La natura delle grandezze da misurare nelle applicazioni pratiche é in genere estremamente varia ed a tale scopo é stata creata una grande varietà di trasduttori e amplificatori dedicati. Qui, senza pretendere di esaurire il vasto campo di fenomeni fisici considerati vengono descritti solo alcuni dispositivi di uso più comune.
2.-Fenomeni fisici utilizzati nei trasduttori.
Esiste una grande varietà di fenomeni fisici che possono essere utilmente impiegati per la misura di grandezze meccaniche, termiche ecc. Qui ci si limita ad una panoramica estremamente succinta dei più noti e delle loro applicazioni.
3.-Piezoelettricità, Piroelettricità e Ferroelettricità.
Quando due o più atomi diversi si uniscono in una molecola scambiandosi elettroni all’interno di un cristallo, la nube di elettroni che li circonda spesso non ha il baricentro coincidente con quello dei corrispondenti nuclei positivi per cui si forma un dipolo di carica come indicato schematicamente in Fig. 1.
Fig. 1: Formazione di un dipolo in una molecola con due atomi diversi.
Tale dipolo interagisce coi dipoli vicini e contribuisce a dare una forma particolare alla cella elementare del cristallo. Dal punto di vista dell’utilizzazione pratica di questo fenomeno fisico si possono dare allora essenzialmente tre casi:
- Piezoelettricità: la forma della cella elementare si assesta in modo da essere caratterizzata a riposo da dipolo risultante nullo. Tuttavia se si sottopone il cristallo che è anisotropo a uno sforzo meccanico, la geometria della cella viene cambiata non solo nelle sue dimensioni ma soprattutto nella sua forma. L’equilibrio dei dipoli viene così alterato con la conseguente comparsa di una tensione risultante proporzionale, entro certi limiti, alla deformazione.
- Piroelettricità: la cella elementare assume una forma tale per cui i singoli dipoli danno luogo ad una risultante permanente non nulla. Poiché l’entità di questa risultante dipende dalla distanza di separazione dei singoli atomi, una variazione di temperatura alterando le distanze produce una variazione di tensione ai capi del cristallo.
- Ferroelettricità: a differenza del caso precedente in cui la struttura cristallina è rigida, esistono dei materiali in cui i bipoli o gruppi di bipoli (domìni), sono parzialmente liberi di ruotare. La mutua interazione tende perciò ad allinearli lungo una orientazione comune. L’applicazione di un campo elettrico favorisce tale processo di passaggio da uno stato iniziale di disordine ad uno di maggior allineamento con conseguenti fenomeni di incremento di campo elettrico, saturazione ed isteresi analoghi a quelli ben noti dei materiali ferromagnetici (d’onde il nome). La ferroelettricità è comunque un fenomeno abbastanza raro e sono pochi i composti che la presentano e in limitati intervalli di temperatura: oltre al ben noto sale di Rochelle vi è il il Titanato di Bario (BaTiO3) e pochi altri.
Va infine aggiunto che la piroelettricità e la ferroelettricità hanno uno o più valori critici di temperatura, detti punto di Curie, attraversando i quali le suddette proprietà appaiono o scompaiono.
4- Termogiunzione, Fotogiunzione e Piezogiunzione.
La caratteristica tensione corrente di una giunzione p-n a semiconduttore è data dalla nota relazione:
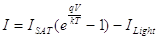
in cui ILight è una corrente costante indotta nella giunzione da una radiazione esterna che incidendo sugli elettroni in banda di valenza li fa passare in banda di conduzione. Il segno di ILight è negativo perché il campo elettrico all’interno della zona di svuotamento, che mette in moto gli elettroni appena liberati, ha segno opposto a quello applicato esternamente. Si ha inoltre la seguente relazione di proporzionalità:
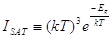
dove T è la temperatura assoluta ed Egè il salto di energia tra banda di valenza e di conduzione.
Come si vede il termine ISAT, che ha il significato più ampio di termine moltiplicativo della corrente totale della giunzione, varia sia al variare della temperatura che della eventuale deformazione del cristallo. Il salto di energia Eg è infatti fortemente dipendente dalle dimensioni della cella elementare del cristallo del semiconduttore utilizzato.
Per esempio se si sottopone il cristallo di Silicio ad una sollecitazione di pressione nella direzione cristallografica <100> si ha un decremento di Eg pari a 105 eV/Bar. Se perciò si indica con ISAT0(T) il valore della corrente di saturazione in assenza di sforzo, l’equazione della giunzione si può scrivere nella forma completa:

dove appaiono le tre grandezze fisiche fondamentali, temperatura T, pressione P e radiazione (a è un coefficiente numerico di proporzionalità).
In particolare in assenza di radiazione luminosa si ha la situazione di Fig. 2 che corrisponde al cosidetto termo e/o piezodiodo.
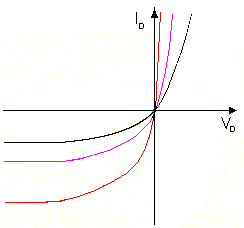
Fig. 2 : Caratteristica di un termodiodo e/o piezodiodo.
In Fig. 3 viene riportata invece la caratteristica del fotodiodo che come si vede si differenzia nettamente dalla precedente.
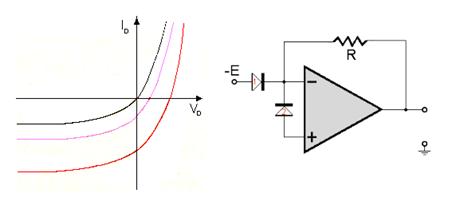
Fig. 3 : Caratteristica di un fotodiodo e sua connessione fotoconduttrice (diodo 1) o fotovoltaica (diodo 2).
La caratteristica del fotodiodo ha la peculiarità che, in presenza di radiazione luminosa incidente, essa non attraversa l’origine degli assi. Infatti la luce, a differenza della pressione e della temperatura che sono solo degli stati in cui si trova un sistema fisico, è una fonte di energia ed è perciò in grado di far circolare corrente anche in assenza di tensione applicata.
5.- Microstrutture su Silicio.
Il cristallo di silicio è una struttura anisotropa molto complessa in cui si possono mettere in evidenza piani aventi densità atomica diversa. È quindi possibile, usando agenti chimici opportuni (soluzioni acquose di idrato di potassio, ecc.), effettuare una demolizione (etching) preferenziale che rispetti i piani ad alta densità e distrugga gli altri. In questo modo si ottengono microstrutture che sono particolarmente utili nella realizzazione di trasduttori e dispositivi di varia natura. Per esempio in Fig. 4 viene mostrato come sia possibile realizzare ponti, membrane, cavità, ugelli ed anche scavi a pareti verticali.
Una delle procedure più delicate dei processi descritti consiste nel calibrare con precisione lo spessore delle membrane sottili o delle leve (vedi Fig. 4).
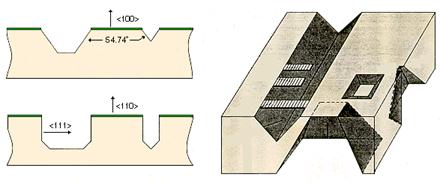
Fig. 4: Strutture ricavate in wafer di silicio con diversa orientazione
A tale scopo si usa spesso inserire per diffusione nel semiconduttore strati di sbarramento di Boro che ne bloccano la demolizione chimica. Il Boro ha però il difetto di drogare troppo intensamente di tipo p il semiconduttore, impedendo così il suo uso quale materiale di supporto per la realizzazione di circuiti monolitici ausiliari da associare al trasduttore stesso.
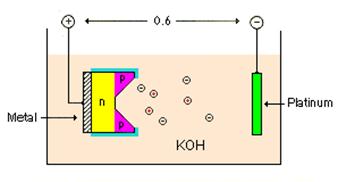
Fig. 5: Stop elettrochimico.
Un procedimento alternativo che non soffre di questa limitazione è quello denominato stop elettrochimico a giunzione p-n, illustrato in Fig. 5. Lo stop elettrochimico si basa sull'uso di una soluzione alcalina demolitrice caratterizzata da una transizione attivo/passivo molto ripida, in corrispondenza di circa 0.5 volt (per il Silicio). Questo significa che se il blocco di Silicio immerso nella soluzione si trova a potenziale anche di poco superiore a 0.5 volt rispetto ad essa non viene demolito. Se allora si immerge nella soluzione demolitrice una giunzione polarizzata inversamente con una tensione esterna di poco superiore a 0.5, la zona n rimane protetta mentre la zona p viene dissolta in breve tempo. La velocità di demolizione della zona p non protetta (cioè quella a potenziale inferiore a 0.5 volt) risulta essere circa 200 volte maggiore di quella nella zona n protetta, garantendo errori trascurabili nello spessore ottenuto.
6.- Primo esempio di applicazione di microstrutture su Silicio: realizzazione di un accelerometro assiale.
Un tipico esempio di impiego delle tecniche di realizzazione di microstrutture su Silicio è l'accelerometro assiale mostrato in Fig. 6. Come si vede una massa centrale è sospesa a quattro barrette sottili laterali in cui vengono diffusi delle piezogiunzioni. Lo spessore tipico delle barre di sospensione è 10 micron mentre il lato della massa sospesa è dell'ordine di 2000 micron e il suo peso di 4 milligrammi.
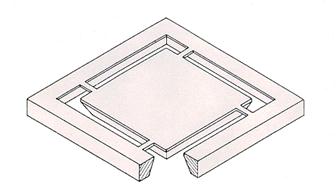
Fig. 6: Vista tridimensionale della struttura meccanica di un accelerometro interamente realizzato su Silicio.
Il supporto esterno viene collegato rigidamente all’oggetto di cui si vuole misurare l’accelerazione istantanea mentre la massa centrale è libera di oscillare.
Detta allora y la posizione verticale del supporto e ym quella della massa sospesa, quest’ultima è soggetta ad una forza di richiamo pari a k(ym – y), dove k è un coefficiente dipendente dalla rigidità della barrette di sospensione, che equilibra la sua inerzia e cioè:

Supponendo allora che k sia molto grande (barrette di sospensione molto rigide) si deve supporre che sia (ym – y)  y. Ammettendo che tale relazione approssimata valga anche per le derivate prima e seconda si ha:
y. Ammettendo che tale relazione approssimata valga anche per le derivate prima e seconda si ha:
In altre parole per misurare la accelerazione istantanea basta misurare l’entità dello spostamento (ym – y) ovvero la deformazione delle barrette di sostegno. A tale scopo si piazza una piezogiunzione su ciascuna barretta come indicato schematicamente in Fig. 7. Va notato che le piezogiunzioni sono poste in due posizioni diverse allo lo scopo di favorire i segnali derivanti da un moto della massa sospesa in direzione assiale (cioè lungo l'asse z) eliminando invece gli effetti dovuti ad altri possibili movimenti.
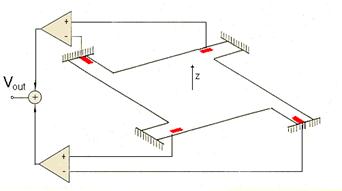
Fig. 7: Schema di principio dell'accelerometro con indicate le piezogiunzioni.
Ciascun piezodiodo è in realtà la giunzione base-emettitore di un transistor che viene inserito in un circuito elettronico come quello di Fig. 8.
L’amplificatore operazionale impone una corrente di collettore e quindi di giunzione base-emettitore costante. Va notato che allo scopo di garantire la stabilità del circuito occorre collegare il collettore del transistor al morsetto non-invertitore dato che il transistore funge da invertitore di tensione.
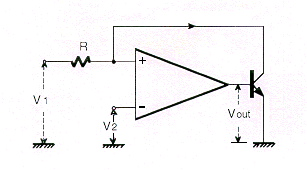
Fig. 8: Circuito a corrente di collettore costante con tensione di giunzione all'uscita dell'amplificatore
Se si suppone che la tensione base emettitore sia sufficientemente elevata si può assumere:

da cui, essendo Ic costante segue aP+qVBE=c0.
Misurando allora la tensione base-emettitore e conoscendo le costanti a e c0 si può risalire al valore di P. In pratica il termine costante c0 scompare dato che la struttura di Fig. 7 effettua la differenza tra due piezogiunzioni eguali ma sollecitate in modo opposto.
7.- Secondo esempio di applicazione di microstrutture su Silicio: realizzazione di trasduttori di pressione.
Le membrane visibili in Fig. 4 si possono utilizzare per la misura di pressioni di valore non troppo elevato (normalmente fino a 50 Bars ).
In pratica si sfrutta la variazione dimensionale (lunghezza o sezione) di resistori diffusi in prossimità dei bordi di una membrana sottile, in cui la deformazione per effetto della pressione é più intensa, come mostrato in Fig. 9. La disposizione dei corpi resistivi è inoltre tale da dare luogo ad un aumento di resistenza in due di essi e ad una diminuzione negli altri due.
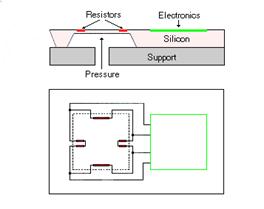
Fig. 9: Struttura di un trasduttore di pressione a membrana di Silicio.
Le quattro resistenze vengono quindi inserite in un ponte di misura, mostrato in Fig 10.
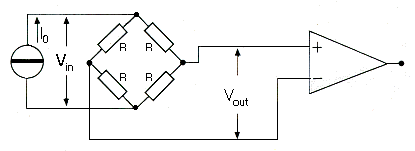
Fig. 10: Circuito di misura.
L'alimentazione del ponte a corrente costante ha lo scopo di minimizzare l'effetto della temperatura sulla funzione di trasferimento del circuito di misura. Si ha infatti (vedi Fig. 10):

in cui il valore della resistenza R, realizzata nel semiconduttore, è fortemente dipendente dalla temperatura. Il guadagno E/(2R) del ponte di misura si può però rendere insensibile alle variazioni di temperatura stabilizzando il valore della corrente di alimentazione, che coincide appunto con E/R.
8.-Esempio di applicazione dell’effetto piezoelettico: trasduttori a quarzo, amplificatori di carica.
Nel caso in cui si debba effettuare la misura di pressioni avente valori elevati (ad esempio quelle che si verificano all'interno dei cilindri di un motore a scoppio) si impiegano dei trasduttori a quarzo che consentono la misura di pressione fino a oltre 7500 Bars.
La misura di pressioni mediante trasduttori a quarzo (cristallo di SiO2) si basa sul ben noto effetto piezoelettrico. Naturalmente, a seconda di come viene tagliato, da un cristallo di quarzo si possono ottenere dei dischi sensibili alla pressione o anche allo sforzo di taglio.
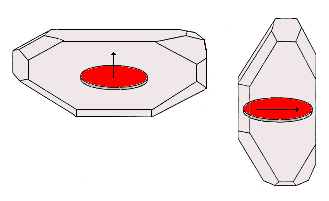
Fig. 11: Cristallo di quarzo e relativi dischi trasduttori.
Sottoponendo uno dei dischi di Fig. 11 ad una sollecitazione meccanica (pressione o taglio) si ottiene una carica di dipolo in superficie la cui entità é linearmente dipendente dalla intensità della pressione applicata:

Una volta nota la carica Q si può quindi risalire direttamente alla pressione P. Il problema della misura di Q non é però facile. Tenendo presente che il quarzo stesso ha una capacità propria C si potrebbe pensare di effettuare la misura della tensione ai suoi capi V=Q/C e poi risalire al valore di Q. Tale procedimento non é però possibile perché la capacità del quarzo varia a sua volta per effetto della deformazione e quindi non è nota.
Si preferisce quindi effettuare il trasferimento virtuale su di una capacità nota e con caratteristiche stabili della carica generata, misurando poi la tensione ai capi di quest’ultima. Ciò si ottiene a mezzo del così detto amplificatore di carica, il cui circuito é riportato in Fig. 12.
La carica Q netta presente in un dato istante ai capi del quarzo é la differenza tra quella di origine dipolare kP e quella Q0 proveniente dal condensatore di reazione C0 che in tal modo si è caricato alla tensione Vout=Q0/C0.
Poiché i morsetti di ingresso dell’operazionale costituiscono un corto circuito virtuale la carica complessiva sul quarzo deve essere nulla da cui segue:

Misurando quindi Vout e conoscendo k e C0 si risale all’entita P della pressione applicata.
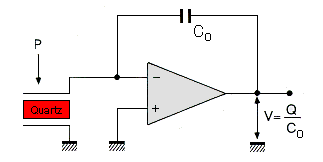
Fig. 12: Amplificatore di carica.
Occorre notare che l'amplificatore di carica ora descritto, benché semplice in linea di principio, é molto delicato e costoso. Basti notare che per avere dei buoni risultati nella misura, l'impedenza di ingresso dell'amplificatore operazionale (realizzato con transistori MOS) deve essere dell'ordine di almeno 1014 ohm. La carica di dipolo indotta dalla deformazione sul quarzo è infatti generalmente piccola (poche decine di pF) per cui una perdita di carica anche minima attraverso i morsetti dell’amplificatore falserebbe in modo intollerabile la misura.
9.-Misure di dilatazione.
In taluni manufatti é importante effettuare una misura delle deformazioni subite in certi punti durante le prove di collaudo o anche durante il normale funzionamento. Esempi tipici sono le travature di ponti metallici, i serbatoi in pressione, le pale delle turbine idrauliche, le bielle dei motori a scoppio, le ali degli aerei e in generale tutti quei dispositivi meccanici che a lungo andare possono incorrere in una rottura causata dalla eccessiva dilatazione o compressione subite.
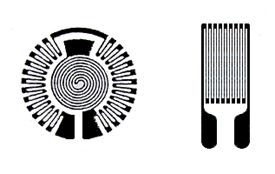
Fig 13: Esempi di estensimetri.
La misura di tali variazioni si fa in genere a mezzo di trasduttori estensimetrici (strain gauge) costituiti da una resistenza metallica depositata su di un supporto elastico di resina epossidica. Due esempi di forme utilizzate sono riportate in Fig. 13 e hanno lo scopo di misurare l'entità di allungamenti, compressioni e torsioni.
Il trasduttore viene incollato sul punto da controllare ed inserito in un ponte di misura alimentato con tensione alternata di frequenza opportuna. Va notato che per minimizzare l'effetto di variazione dovuto alla temperatura gli estensimetri vanno sempre montati in coppia (estensimetro di misura + estensimetro di bilanciamento) in modo che essi si trovino l'uno in prossimità dell'altro e quindi alla stessa temperatura. Naturalmente l'estensimetro di bilanciamento deve essere montato in un punto non sottoposto a sollecitazione meccanica.
10.-Misure di temperatura.
I trasduttori di temperatura più comunemente usati sono le resistenze di platino, le termocoppie e i termistori. Tuttavia sia le termocoppie che presentano livelli di tensione piuttosto bassi e necessitano di procedimenti di compensazione dispendiosi, sia i termistori che sono non lineari, presentano difficoltà nelle applicazioni pratiche. Si sono perciò affermate tecniche di misura di temperatura basate sul termodiodo e precisamente sulla giunzione base emettitore di una coppia di transistori bipolari che lavorano a densità di corrente diverse.
Si considerino infatti due transistori Q1 e Q2 supposti alla medesima temperatura e con l’emettitore posto in comune. Indicando con IE1 e IE2 le rispettive correnti di collettore e facendo l’ipotesi che valga la relazione approssimata:

valida per elevate correnti, si ha:
Se allora si riesce, mediante un artificio qualsiasi, a mantenere costante il termine entro logaritmo, la differenza di tensione misurata tra le due basi si può utilizzare direttamente per la misura della temperatura assoluta dell’ambiente in cui è posta la coppia di transistori. Normalmente si preferisce utilizzare due transistori con caratteristiche (densità di corrente di fuga JSAT e guadagni a) identiche, ma con un’area di emettitore diversa e controllare le rispettive correnti di collettore in modo che siano eguali. In tal caso detto r il rapporto tra le aree di emettitore si ha (si noti che l’introduzione del rapporto r ha avuto per conseguenza la sostituzione delle correnti di saturazione con le rispettive densità di corrente):
che diventa
se si assume, come già detto in precedenza, JSAT1 = JSAT2ea1 = a2.
Il circuito utilizzato a tale scopo è riportato in Fig. 14.
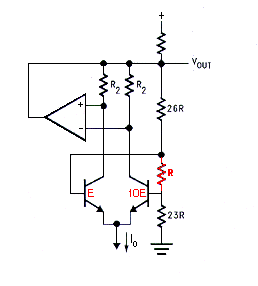
Fig. 14: Circuito per la misura della temperatura assoluta.
L’amplificatore operazionale crea un corto circuito virtuale sui morsetti di ingresso imponendo così l’eguaglianza delle correnti di collettore. La tensione di uscita è misurata ai capi della serie di resistenze 26R, R e 23R e risulta quindi essere 50 volte la differenza di potenziale tra le basi. Se si usa un rapporto r = 10, come nel caso della Fig. 14, si ottiene una sensibilità di circa 0.2mV per grado Kelvin.
Ovviamente è possibile introdurre delle modifiche circuitali in modo che la tensione in uscita sia proporzionale alla scala Celsius (0°C=273°K) o alla scala Fahrenheit.
11.-Trasduttori piroelettrici.
L’effetto piroelettrico (vedi Par. 3) pur non avendo quelle caratteristiche di linearità che ne permettono l’impiego nella misura della temperatura, possiede tuttavia il vantaggio di fornire valori di tensione molto più elevati degli altri trasduttori (termocoppie, termodiodi) e di essere largamente insensibile al tipo di radiazione che provoca l’aumento di temperatura.
Essi possono pertanto essere utilizzati come rivelatori di una vasta gamma di sorgenti di radiazione che vanno dal lontano infrarosso, ai raggi X. Il materiale più usato è il cristallo di Tantalato di Litio, che ha un punto di Curie a 610 °C. La radiazione incidente sia essa infrarossa o a raggi X viene convertita in calore. Il trasduttore piroelettrico è perciò non selettivo per natura e se tale qualità gli permette di essere utilizzato in un vasto campo di applicazioni è spesso necessario utilizzare dei filtri appositi onde restringere il campo di lunghezze d’onda rivelate.
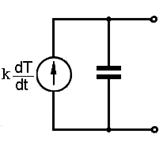
Fig. 15: circuito equivalente di un trasduttore piroelettrico.
Il circuito equivalente elettrico del trasduttore piroelettrico è quello mostrato in Fig. 15. Il generatore di corrente dT/dt che appare in Fig. 15 è proporzionale alla entità della variazione di temperatura nell’unità di tempo. Il livello del segnale è molto elevato per cui è possibile collegare direttamente il trasduttore a un carico, oppure utilizzare un amplificatore operazionale, come indicato in Fig. 16.
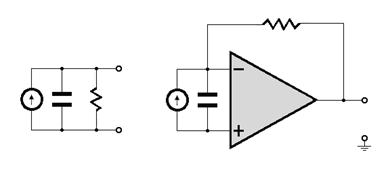
Fig. 16: Connessioni del trasduttore piroelettrico.
Va notato che il collegamento diretto al carico deforma una veloce variazione di temperatura, introducendo dei fronti di salita e di discesa in un segnale DI di tipo impulsivo. Al contrario la connessione diretta all’ingresso dell’amplificatore operazionale, cortocircuitando il condensatore, ne annulla gli effetti ritardanti. Tuttavia quest’ultima soluzione ha per conseguenza una intensa amplificazione degli eventuali rumori presenti, con notevole peggioramento del rapporto segnale disturbo.
Una applicazione tipica del trasduttore piroelettrico è il rivelatore di passaggio: due trasduttori identici vengono posti uno accanto all’altro in posizione leggermente angolata come indicato in Fig. 17.
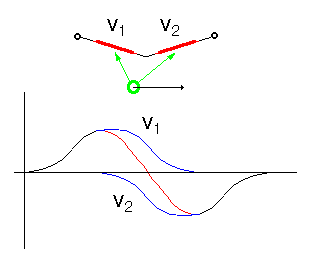
Fig. 17: Rivelatore di passaggio di corpo caldo.
Quando un corpo caldo (ad esempio il volto di una persona) passa davanti alla coppia di trasduttori, induce sul primo sensore un impulso di tensione V1 seguito subito dopo da un altro impulso V2 identico ma leggermente sfalsato nel tempo, nell’altro trasduttore. Ponendo in serie i due trasduttori si ottiene una forma d’onda (vedi Fig. 17) che segnala il passaggio e la direzione in cui esso avviene.
12.-Amplificatori per strumentazione.
Un amplificatore per strumentazione deve avere alcune proprietà peculiari che lo distinguono da un semplice amplificatore operazionale. A parte i requisiti di precisione e di stabilità termica, esso anzitutto deve poter effettuare la differenza tra due tensioni senza assorbire corrente da entrambi i morsetti di ingresso. Deve inoltre poter aggiustare il suo guadagno con l’inserzione di una unica resistenza esterna e infine deve avere la possibilità di eliminare l’effetto di disturbi indotti sul trasduttore cui si collega. La struttura tipica di un amplificatore per strumentazione è riportata in Fig 18.
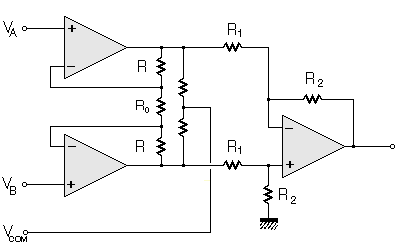
Fig. 18: Schema di amplificatore per strumentazione.
Come si vede non vi è assorbimento di corrente nei due morsetti di ingresso e il guadagno di tensione è dato dalla relazione  .
.
Vi è inoltre disponibile la tensione di modo comune 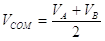 che, come verrà mostrato nel seguito, viene impiegata per minimizzare l’effetto dei disturbi soprattutto quando si usano cavi di collegamento di notevole lunghezza e trasduttori a basso livello di tensione.
che, come verrà mostrato nel seguito, viene impiegata per minimizzare l’effetto dei disturbi soprattutto quando si usano cavi di collegamento di notevole lunghezza e trasduttori a basso livello di tensione.
13.-Pilotaggio della calza schermante.
Dato che nella maggior parte dei casi i segnali da amplificare sono di livello basso e il trasduttore si trova a distanza non trascurabile dall’amplificatore, per proteggerli dai disturbi é necessario ricorrere ad un cavo schermato. Lo schermo usato (calza di rame flessibile) è in grado di proteggere il segnale utile unicamente dai disturbi a radiofrequenza.
I disturbi di bassa frequenza (soprattutto quelli a frequenza di rete) transitano invece attraverso di esso senza attenuazione apprezzabile e se le resistenze e capacità parassite dei due cavi interni non sono perfettamente uguali inducono tensioni di notevole entità che giungono con una differenza di fase non trascurabile ai morsetti di ingresso dell’amplificatore. L'effetto, molto dannoso, può essere evitato con l'impiego della tecnica che va sotto il nome di "pilotaggio della guaina del cavo (shield driving)". Si tratta di un artificio, descritto schematicamente in Fig. 19 e che consiste nell'applicare direttamente alla guaina del cavo la tensione ausiliaria VCOM vista in precedenza. In questo modo, essendo  e pertanto la loro influenza é quasi del tutto annullata. Analogo discorso per il cavo B. In altre parole questa tecnica non elimina i disturbi, ma impedisce al cavo di sfasarli.
e pertanto la loro influenza é quasi del tutto annullata. Analogo discorso per il cavo B. In altre parole questa tecnica non elimina i disturbi, ma impedisce al cavo di sfasarli.
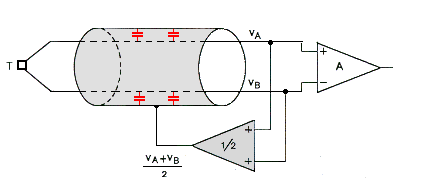
Fig. 19: Pilotaggio della guaina.
14.-Pilotaggio del corpo del trasduttore.
Una tecnica alternativa del pilotaggio della calza è il pilotaggio del corpo del trasduttore (bootstrapping). Questa metodo è impiegata quando non è possibile collegare il trasduttore con un cavo schermato e l’unica possibilità per minimizzare l’effetto dei disturbi è la loro eliminazione per quanto possibile. In questo caso la tensione VCOM =(VA +VB )/2 viene amplificata il più possibile e riapplicata con segno invertito al corpo del trasduttore, supposto sede dei disturbi. Si tratta in pratica di controreazionare il disturbo in modo da minimizzarne l’entità. È una tecnica usata ad esempio in campo medico nel rilievo dell’elettrocardiogramma, come mostrato in Fig. 20
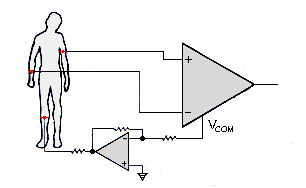
Fig. 20: Pilotaggio del corpo.
15.-Autoazzeramento.
Un'altra prestazione essenziale di un amplificatore di misura consiste nella possibilità di correzione automatica della deriva termica della condizione di zero. Quando infatti il segnale é assente occorre che la tensione in uscita sia rigorosamente nulla anche se in pratica ciò non si verifica mai a causa delle inevitabili derive termiche dei componenti. Normalmente l’azzeramento si può effettuare manualmente aggiustando il valore di una delle due tensioni di alimentazione fino a che la tensione in uscita, in assenza di segnale, é nulla. Tale procedura può essere automatizzata impiegando il circuito di Fig. 21.
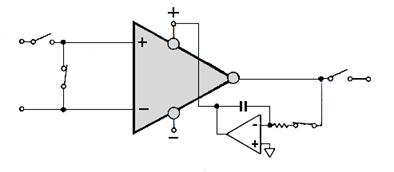
Fig. 21: Circuito di autoazzeramento.
Come si vede un circuito integratore di segnale provvede alla tensione di alimentazione positiva dell'amplificatore. Applicando ad istanti prestabiliti e che non interferiscano con il procedimento di misura, il segnale di uscita con tensione di ingresso nulla all'integratore si effettua una correzione della tensione di alimentazione che permette di annullare la deriva termica della condizione di zero.
16.-Amplificatori di isolamento.
Un problema che spesso si incontra nel campo delle misure industriali é quello di amplificare un segnale fornito da un trasduttore avente un riferimento di tensione diverso da quello dei circuiti di acquisizione e di elaborazione. Tale situazione é pressoché generalizzata nel campo medico in cui é essenziale proteggere il paziente da eventuali pericolosi malfunzionamenti dei circuiti di monitoraggio e registrazione. Un altro esempio é quello della misura della corrente che attraversa un carico con entrambi i morsetti fuori massa.
In questi casi si fa uso di un amplificatore di isolamento che permette di ottenere una tensione proporzionale al segnale utile pur senza un collegamento diretto tra il circuito di acquisizione e il sensore. Un esempio tipico di amplificatore di isolamento è il cosidetto amplificatore ad accoppiamento ottico il cui schema è riportato in Fig. 22. Per uno studio dettagliato del circuito si può fare l'ipotesi che esista il seguente legame analitico approssimato tra corrente di foto-diodo e la corrente di collettore del foto-transistor:

Tenendo allora conto che l’ingresso dell’amplificatore operazionale posto a destra si comporta come un corto circuito virtuale, si ha  da cui segue:
da cui segue:

Allo scopo di garantire che per tensione di ingresso nulla si abbia tensione di uscita nulla, occorre scegliere le resistenze poste sui collettori dei transistor in modo da soddisfare alla condizione

In pratica ciò si ottiene automaticamente in sede di realizzazione del circuito monolitico, aggiustando i valori delle due resistenze a mezzo di un fascio laser che ne assottigli il profilo (laser trimming). Una volta sodisfatta la condizione di zero, la tensione di uscita dell'amplificatore assume la espressione:
Poiché il valore del rapporto n1/n2 può discostarsi anche in modo sensibile da 1, il guadagno risulta lineare solo per piccoli segnali. In questa ultima ipotesi si ottiene infatti:
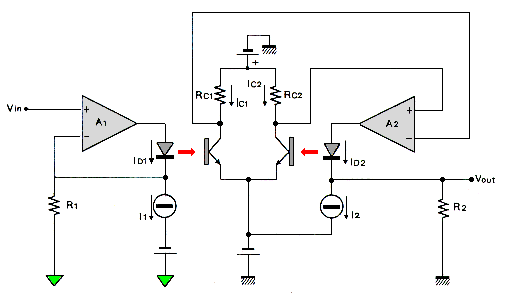
Fig. 22: Amplificatore ad accoppiamento ottico (notare le masse differenti).
Per quel che riguarda infine il comportamento dinamico, si può dire che esso é più che soddisfacente nella maggioranza dei casi; in pratica si raggiunge un prodotto guadagno per larghezza di banda dell'ordine di 10 MHz.
17.-Zero Crossing detector.
Un circuito che si usa spesso in pratica è il rivelatore di passaggio per lo zero di forme d’onda. Il dispositivo impiega un comparatore che commuta quando la tensione attraversa lo zero all’istante t1 ed un altro comparatore che, tramite un flip-flop che commuta sul fronte di discesa del clock, inibisce il primo durante la fase iniziale in cui la tensione in ingresso non ha ancora assunto valori significativi. Lo schema e le forme d’onda sono riportate in Fig. 23.
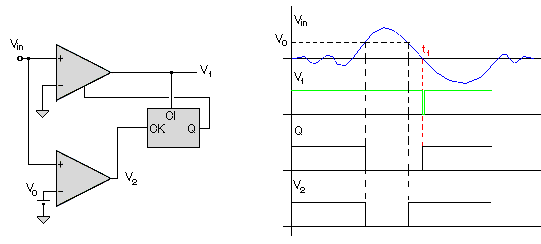
Fig. 23: Schema e forme d’onda nel circuito rivelatore di zero crossing.
La tensione V1 in uscita al primo comparatore si annulla segnalando l’attraversamento dello zero e contemporaneamente resettando il Flip-Flop ed inibendo il primo comparatore. In questo modo la tensione V1 presenta un impulso strettissimo il cui fronte di discesa coincide con l’istante t1
18.-Trasduttori di posizione.
Quando si vuol spostare un dispositivo qualsiasi, per esempio il braccio mobile di un robot o la piattaforma mobile di una macchina utensile si deve porre un trasduttore rotativo o lineare, direttamente su di esso. Esiste quindi una grande varietà di dispositivi caratterizzati da precisione e campo di impiego i più svariati.
Vi sono trasduttori rotativi e lineari analogici che codificano lo spostamento sotto forma di una grandezza (tensione, fase ecc.) variabile con continuità, così come esistono trasduttori che codificano in forma binaria lo spostamento in modo da renderlo direttamente utilizzabile dai dispositivi di calcolo digitale che normalmente si usano nelle applicazioni.
19.-Il trasduttore lineare a trasformatore differenziale (LDVT)
Uno dei dispositivi più diffusi, anche in virtù della sua semplicità ed economicità, è il cosidetto trasduttore lineare a trasformatore differenziale (LDVT) la cui struttura realizzativa e lo schema equivalente sono riportati in Fig. 24.
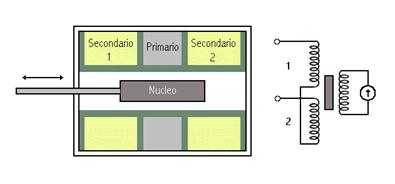
Fig. 24: Struttura di un LDVT.
Come si vede, esso è costituito da un nucleo mobile che accoppia magneticamente due secondari eguali ad un unico primario. Quando il nucleo si trova in posizione centrale le tensioni indotte sono eguali e quindi la loro differenza è zero. Quando invece il nucleo si sposta verso uno dei due secondari ne innalza la tensione a scapito dell’altro secondario per cui la somma algebrica delle tensioni cresce con lo spostamento.
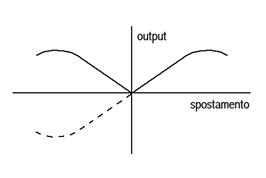
Fig.25: Tensioni raddrizzate proporzionali allo spostamento.
Normalmente si alimenta il primario a frequenza dell’ordine del kHz e si raddrizza la tensione differenza o con un normale demodulatore ad inviluppo o con un raddrizzatore sincrono, ottenendo così le tensioni in uscita mostrate in Fig. 25.
A differenza del demodulatore ad inviluppo, che da il modulo della ampiezza, il raddrizzatore sincrono è un moltiplicatore che effettua il prodotto tra la tensione di ingresso e quella di uscita, ottenendo un termine proporzionale all’ampiezza con segno (curva tratteggiata) di quest’ultima. Come si vede il dispositivo in questione ha un campo di utilizzo abbastanza limitato dato che per forti spostamenti la sua caratteristica si incurva allontanandosi dalla linearità.
20.-Syncro-resolver.
Il syncro-resolver è un trasduttore rotativo analogico realizzato a mezzo di un rotore e uno statore su i quali sono disposti due avvolgimenti a 90 gradi, come è indicato in Fig. 26.
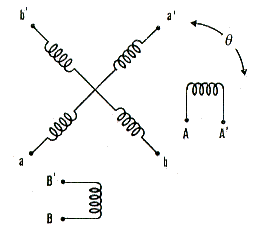
Fig. 26: Struttura di un syncro-resolver.
L'apparecchiatura di Fig. 26 si presta a generare un segnale sinusoidale modulato sia in fase, sia in ampiezza a seconda delle esigenze.
- generatore di segnale modulato in fase.
Si supponga di alimentare gli avvolgimenti di rotore con due tensioni di ampiezza eguale ma sfasate di 90 gradi:
Vaà = V0 senwt
Vbb' = V0 coswt
I campi magnetici che ne conseguono inducono sugli avvolgimenti delle f.e.m. la cui ampiezza è funzione del valore attuale dell'angolo di rotazione. Supposto in particolare un rapporto spire unitario tra avvolgimenti di statore e di rotore si ha:
VAÀ = V0 cosq senwt - V0 sinq coswt
VBB' = V0 sinq sinwt + V0 cosq coswt
Tenendo presente le note formule trigonometriche per il calcolo del seno e coseno della somma di due angoli si ottiene:
VAÀ = V0 sen(wt-q)
VBB' = V0 cos(wt-q)
cioè due segnali sinusoidali la cui fase coincide con l’angolo di rotazione q del rotore rispetto allo statore.
- generatore di segnale modulato in ampiezza.
Si supponga ora di alimentare gli avvolgimenti di rotore con due tensioni sinusoidali Vaà = V1 sinwt e Vbb' = V2 sinwt in fase tra di loro ma con ampiezze diverse. In questo caso si ha:
VAÀ = V1 cosq senwt – V2 sinq sinwt
VBB' = V2 sinq sinwt + V1 cosq sinwt
Se a questo punto si suppone che sia V1 = V0 sinq0e V2 = V0 cosq0 si ottiene:
VAÀ = V0 sen(q0-q) sen(wt)
VBB' = V0 cos(q0-q) sen(wt)
cioè due segnali sinusoidali la cui ampiezza dipende dalla differenza tra un angolo q0 prefissabile arbitrariamente e l'angolo di rotazione attuale q.
21.-Inductosyn.
L'inductosyn si può ritenere la versione lineare del syncro resover. Esso infatti è costituito da un conduttore disposto ad onda quadra inserito in un supporto isolante, che funge da regolo fisso, come è indicato in Fig. 27, sopra il quale scorre un cursore con due conduttori separati disposti a loro volta ad onda quadra e sfalsati tra di loro di n-1/4 periodi.
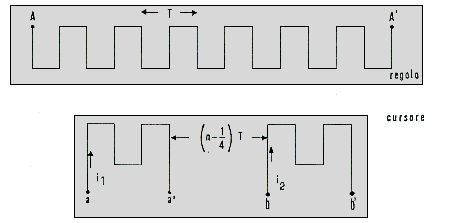
Fig. 27: Struttura dell'Inductosyn.
Quando il cursore è sovrapposto al regolo in modo che i piani dei rispettivi conduttori siano paralleli e molto ravvicinati (di solito distano 0.25 mm.) e si fanno circolare due correnti sinusoidali I1 e I2 negli avvolgimenti del cursore, esse inducono nel circuito del regolo delle tensioni la cui ampiezza è funzione del mutuo spostamento x.
Si consideri infatti la Fig. 28 in cui è riportato per semplicità un tratto unico per ciascun conduttore aa’ e bb' del cursore insieme con la coppia sottostante di fili più vicini del regolo. Osservando tale figura e tenendo conto che le f.e.m. indotte su due fili contigui dell'avvolgimento AA’ si sommano algebricamente, si può concludere che quando la distanza x è eguale a 0 o a T/2 la tensione indotta dalla corrente I1 su AA’ è massima e viceversa è nulla per x=T/4. Essa è di ampiezza circa cosinusoidale al variare di x, mentre quella causata da I2 ha ampiezza sinusoidale a causa dello sfalsamento (n-1/4)T tra le due disposizioni ad onda quadra del cursore. In pratica, tenendo conto che per tutti gli altri tratti di conduttore di aa’ e bb' vale un ragionamento analogo, si può scrivere:

in cui k è una costante dipendente dalle dimensioni geometriche del dispositivo. Analogamente al caso del resolver si possono ottenere due tipi di segnali, uno modulato in fase e l'altro modulato in ampiezza.
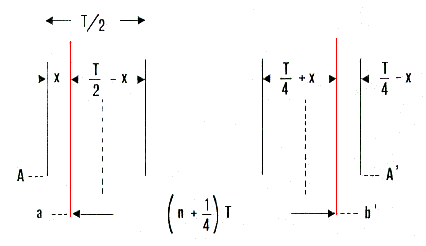
Fig. 28: Particolare dell'avvolgimento.
L'indicazione dell'inductosyn è priva di ambiguità in un intervallo limitato, come verrà chiarito in seguito parlando dei servoposizionatori che ne fanno uso; esso va perciò montato in coppia con un indicatore grossolano (di solito un syncro-resolver) che serve a posizionare l’organo mobile in prossimità dalla quota desiderata dopodichè l’inductosyn permette il raggiungimento di essa con la precisione dell'ordine del micron. Esistono inoltre speciali inductisyn detti a tre piste che sono autosufficienti essendo formati dalla unione di tre inductosy separati aventi periodi pari a T1 = 2 mm. (pista fine), T2 = 200 mm. (pista media) e T3 = 1200 mm. (pista grossolana)
22.-Codificatori digitali di posizione.
Questi dispositivi sono dei veri e propri trasduttori digitali di posizione perché convertono direttamente lo spazio angolare (o quello lineare) in un numero rappresentato elettricamente in forma binaria. Il tipo più semplice di codificatore è quello che fa uso di elementi fotosensibili (fotodiodi o fototransistori) che ricevono luce attraverso fessure disposte opportunamente in un disco opaco come mostrato in Fig. 29. Il numero di fotodiodi (e di piste) corrispondenti dipende dal potere risolutivo desiderato. I codificatori digitali ora descritti presentano uno svantaggio che è legato sia alla loro struttura sia al codice utilizzato. Il rilevamento della posizione presenta delle ambiguità negli istanti in cui due o più tracce danno luogo ad una commutazione. Benché infatti le fessure siano realizzate con la massima cura allo scopo di ottenere un perfetto allineamento, le commutazioni inevitabilmente non avvengono nello stesso istante ma con piccoli ritardi l'una rispetto all’altra dando luogo all’apparizione di valori binari errati.
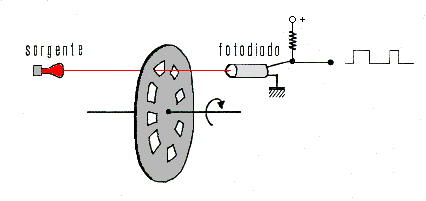
Fig. 29: Trasduttore digitale fotoelettrico.
Ciò provoca una incertezza di lettura che può portare a gravi conseguenze e che deve quindi essere assolutamente eliminata. A tale scopo si utilizza il codice Gray nel quale si passa da un valore binario al successivo mediante la variazione di un solo bit alla volta.
A titolo di esempio in Fig. 30 sono riportati gli oscillogrammi del codice Gray a tre cifre.
Il codice Gray è spesso detto riflesso perché, se si esclude la pista più significativa, gli oscillogrammi sono simmetrici rispetto ad un asse verticale.
Come si vede il passaggio da una cifra decimale alla successiva non può essere mai ambiguo in quanto avviene con una sola variazione alla volta.
Ovviamente le cifre binarie in codice gray debbono venire tradotte in codice binario normale prima di essere utilizzate da un dispositivo di controllo digitale. Ciò si ottiene con la formula ricorsiva:

dove gi è l’iesima cifra gray e bi è la corrispondente binaria pura. Le due cifre più significative coincidono e cioè si ha bn = gn.
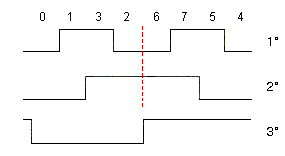
Fig. 30: Struttura di codice Gray.
Il codice Gray presenta però alcuni svantaggi. Anzitutto esso deve essere tradotto in binario per renderlo comprensibile al dispositivo di controllo. Inoltre a causa del fatto che l’ultimo oscillogramma non rispetta la simmetria, due o più codificatori di tipo Gray non possono essere posti in cascata, come è invece possibile fare nel caso dei dispositivi che usano il codice binario naturale.
23.-Posizionamento digitale.
Nel sistema sistema di posizionamento qui descritto usato largamente nel campo delle macchine utensili a controllo numerico, si sfrutta il segnale modulato in fase proveniente da un syncro resolver o inductosyn confrontandolo con un segnale di riferimento la cui fase dipende dalla quota che si vuole raggiungere. Lo schema a blocchi del dispositivo è quello di Fig. 31.
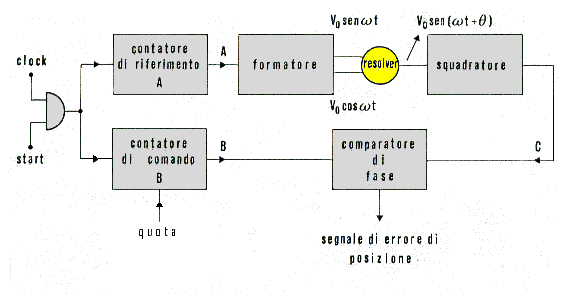
Fig. 31: Schema a blocchi di servoposizionatore digitale.
I contatori A e B che compaiono in Fig. 31 sono di solito di tipo binario a n Flip-Flop dove n è il numero di cifre binarie che compongono il valore numerico della quota che si desidera raggiungere. Ciascun Flip Flop è presettabile a 0 o 1 in modo che il contatore può essere fatto partire con un ben determinato contenuto numerico (binario) iniziale. In tal modo, se w0 rappresenta la frequenza del segnale di clock utilizzato, la tensione in uscita della catena di Flip-Flop si può rappresentare a mezzo dalla relazione (Q(t) stà ad indicare un'onda quadra):
essendo N un numero binario le cui cifre costituenti sono i valori a cui erano stati presettati i rispettivi Flip Flop.
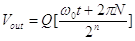
A questo punto il funzionamento del circuito di Fig. 31 risulta abbastanza evidente: infatti il contatore A ad n Flip Flop viene presettato a 0 e l'uscita  p). Per quel che riguarda il comparatore di fase esso deve assolvere alla particolare funzione di confrontare le fasi di due onde quadre indicando anche se il segnale di riferimento anticipi o ritardi quello di comando in modo da poter stabilire il verso necessario di rotazione del motore. Ciò si ottiene ad esempio con un circuito come quello indicato in Fig. 32 che data la sua semplicità non necessita di ulteriori spiegazioni.
p). Per quel che riguarda il comparatore di fase esso deve assolvere alla particolare funzione di confrontare le fasi di due onde quadre indicando anche se il segnale di riferimento anticipi o ritardi quello di comando in modo da poter stabilire il verso necessario di rotazione del motore. Ciò si ottiene ad esempio con un circuito come quello indicato in Fig. 32 che data la sua semplicità non necessita di ulteriori spiegazioni.
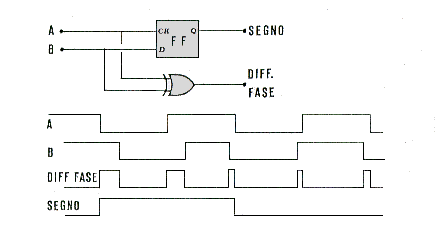
Fig. 32: Struttura del comparatore di fase.
Per quel che riguarda il campo di funzionamento del dispositivo di posizionamento ora descritto esso è limitato ad una rotazione completa del syncro-resolver dato che non è possibile distinguere la generica fase q dalla fase q + k2p . Detto allora d0 l'escursione totale lineare dell'organo mobile espressa in metri, che corrisponde per quanto detto a q0 = 2p cioè al numero N=2n presettato sul contatore, il minimo spostamento ottenibile risulta essere Dd0 = d0/2n. Il numero n dei contatori binari che occorre utilizzare per apprezzare lo spostamento minimo Dd0 è allora dato dalla relazione  Dd0 /d0. A tale limitazione si ovvia utilizzando un secondo resolver (resolver fine) eguale al precedente ma opportunamente demoltiplicato rispetto al primo (resolver grossolano).
Dd0 /d0. A tale limitazione si ovvia utilizzando un secondo resolver (resolver fine) eguale al precedente ma opportunamente demoltiplicato rispetto al primo (resolver grossolano).
24.-Trasduttori incrementali.
Si tratta di una classe particolare di dispositivi che codificano lo spostamento (angolare o lineare) sotto forma di una serie di impulsi di tensione. Ad ogni impulso corrisponde uno spostamento elementare Dd0 del cursore rispetto al regolo fisso; normalmente il valore di Dd0 si aggira intorno a valori dell’ordine del micron. Se perciò si conta il numero di impulsi a mezzo di un contatore digitale si ottiene un valore numerico che moltiplicato per Dd0 fornisce direttamente lo spazio percorso dal cursore a partire dall'inizio del conteggio.
Fig. 33: Trasduttore incrementale rotativo .
Naturalmente in questo modo l'indicazione ottenuta non è assoluta e la precisione dipende anche dall'affidabilità del contatore che deve essere reso il più possibile immune dai disturbi. La struttura di un trasduttore incrementale rotativo è riportata in Fig. 33. In Fig. 34 viene inoltre riportata in dettaglio la parte fissa e quella mobile insieme con le tensioni raccolte dai trasduttori elettronici impiegati (fotodiodi al Silicio). I segnali V1-V2 e V3-V4 sono di forma sinusoidale e vengono poi trasformati in onde quadre per il conteggio.
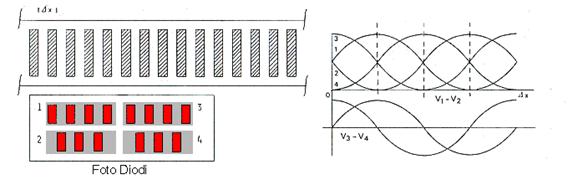
Fig. 34: Particolari del trasduttore e tensioni raccolte dai fotodiodi.
Si noti come la presenza di due segnali sfasati di 90° permettano l’uso di contatori up-down in modo da incrementare o decrementare il conteggio a seconda che ci si sposti verso destra o verso sinistra.
25.-Tecniche di controllo strutturale dei materiali.
Esistono varie tecniche che permettono di verificare se le caratteristiche strutturali di un pezzo lavorato soddisfano a certe specifiche. Quelle non distruttive permettono di ottenere delle informazioni sulle condizioni di un pezzo metallico senza esigerne il sacrificio e pertanto invece che ad un campione ristretto, come nel caso dei test distruttivi, possono essere applicate alla totalità dei pezzi prodotti. Naturalmente esiste un'ampia varietà di metodi tra le quali si ricordano quelli acustici (ultrasuoni) ed anche quelli termici in cui viene misurato il flusso di calore attraverso il pezzo da controllare. Tuttavia i più usati sono certamente quelli che fanno uso dell'energia elettromagnetica introdotta nel pezzo a varie frequenze dalle più basse (metodo magnetico) alle medie (correnti parassite) fino alle più alte (raggi X e gamma).
26.-Controllo strutturale mediante correnti parassite.
Esso si usa nella manutenzione delle apparecchiature più svariate per verificare, dopo un certo periodo di esercizio, le condizioni di un manufatto e quindi la sua resistenza residua all'usura, alla fatica ecc. È possibile anche il controllo continuo di un pezzo durante tutte le fasi della sua lavorazione per verificare quale fase ne può eventualmente pregiudicarne l'integrità.
Il materiale da controllare è portato vicino ad una bobina la quale produce un campo magnetico alternativo ad alta frequenza che penetra all'interno del materiale conduttore e induce delle correnti.
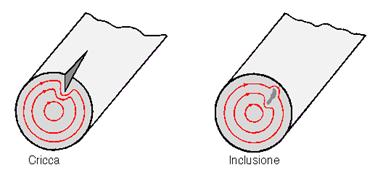
Fig. 35: Alterazioni delle correnti indotte a causa di imperfezioni.
Come è mostrato in Fig. 35, la distribuzione di queste correnti è alterata da inomogeneità poste in superficie (cricche) o all'interno (inclusioni) del pezzo in esame; tali imperfezioni possono quindi essere rivelate da una apposita bobina posta in prossimità della zona in cui si generano le correnti parassite e che ne misura il flusso risultante.
L'entità e la distribuzione delle correnti parassite in un materiale dipende essenzialmente dalla sua conducibilità s, dalla sua permeabilità magnetica m nonché dalla sua forma geometrica. In queste dispense si farà riferimento quasi esclusivamente al caso di un cilindro metallico di estensione illimitata, dato che esso, oltre ad avere notevoli applicazioni pratiche, si presta facilmente ad uno studio analitico.
Si consideri allora il caso di un cilindro metallico di raggio r0 posto all'interno di una bobina percorsa da corrente sinusoidale a frequenza f (e pulsazione w=2pf), come mostrato in Fig. 36.
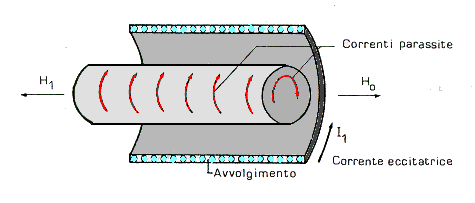
Fig. 36: Dispositivo per la generazione di correnti parassite.
Come si vede la bobina eccitatrice provoca un campo magnetico uniforme H0 cui si contrappone il campo H1 generato dalle correnti parassite indotte. Le equazioni che regolano l'andamento della corrente e dell'induzione all'interno di un conduttore sono la legge di Ohm e le equazioni di Maxwell. Applicando tali relazioni al caso del conduttore cilindrico (i particolari del calcolo sono omessi per semplicità), si ottiene la seguente espressione dell'induzione magnetica all'interno del conduttore:
dove I0 è la funzione di Bessel modificata di prima specie e di ordine zero e k è un parametro (numero complesso) dipendente dalla conducibilità e permeabilità del materiale e dalla frequenza impiegata, avente l'espressione:

La distribuzione dell'ampiezza dell'induzione magnetica lungo il raggio r è mostrata graficamente in Fig. 37 per diversi valori della frequenza della corrente induttrice e del parametro caratteristico k. Il fenomeno descritto in figura, che è noto come effetto pelle, in quanto l'intensità della induzione magnetica B(r) che ne consegue, si riduce man mano che si penetra in profondità nel materiale.
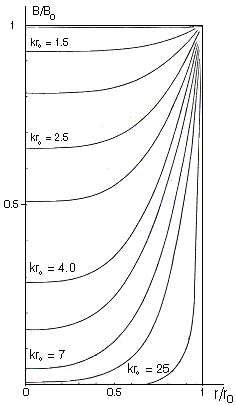
Fig. 37: Andamento dell'induzione all'interno di un conduttore cilindrico
Indicando allora con F il flusso complessivo che attraversa il conduttore (in senso assiale) si può scrivere:

essendo:
un parametro adimensionale, detto anche permeabilità efficace. Quest'ultimo, che è una grandezza complessa, si può esprimere a mezzo della relazione:
dove I1 è la funzione di Bessel modificata di prima specie e di ordine 1.
Come si vede l'espressione di meff dipende attraverso il parametro k dalle caratteristiche fisiche del cilindro. È però possibile normalizzare tale espressione rendendola indipendente dal particolare tipo di conduttore preso in considerazione introducendo la frequenza f0, detta frequenza limite, in corrispondenza della quale il modulo del prodotto kr0 assume valore 1. Si ha infatti

da cui segue:

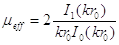
essendo f la frequenza della corrente della bobina induttrice. In Fig. 38 è riportato l'andamento nel piano complesso della permeabilità efficace di un materiale conduttore paramagnetico qualsiasi al variare del rapporto f/f0.
Si supponga ora che intorno al cilindro metallico, oltre alla bobina di induzione, venga disposto un avvolgimento secondario di n2 spire e di raggio r1.
Fig. 38: Permeabilità efficace al variare della frequenza.
La tensione indotta nell'avvolgimento secondario si può allora considerare composta da due parti: quella dovuta all'induzione magnetica entro il cilindro conduttore e quella dovuta all'induzione magnetica nella restante sezione libera.
La f.e.m. totale è quindi data dalla relazione:

Introducendo il fattore di riempimento g, definito come rapporto tra i quadrati del raggio r0 del campione e quello r1 della bobina secondaria l'espressione della tensione indotta sulla bobina secondaria si può riscrivere nella forma:

avendo posto:

L’andamento del rapporto E/E0 per vari valori di g è riportato in Fig. 39. In tale figura è riportata una famiglia di curve al variare del fattore di riempimento. Le curve a tratteggio corrispondono alla situazione fisica di un cilindro con raggio variabile interessato da correnti a frequenza fissa. In altre parole le curve tratteggiate corrispondono all'andamento della tensione indotta sul secondario nell'ipotesi di far variare il raggio r0 del pezzo cilindrico in esame da 0 a r1 (ossia il fattore di riempimento g da 0 a 1).

Fig. 39: Tensione normalizzata indotta sull'avvolgimento secondario per diversi valori del coefficiente di riempimento g. Curva (a): materiale diamagnetico. Curva (b): materiale ferromagnetico.
Osservando la precedente figura si nota un fatto piuttosto importante: supposto infatti di far scorrere la bobina secondaria lungo il cilindro in prova, una variazione delle sue dimensioni (cioè del raggio) o una variazione delle caratteristiche fisiche del materiale (conducibilità, permeabilità) provocano effetti distinguibili. Più precisamente effetti di variazione strutturale (raggio) e di caratteristiche fisiche danno luogo a variazioni in diversa direzione nel piano complesso della tensione della bobina secondaria. Questo fatto può venire sfruttato per rivelare l'entità di variazioni di raggio separatamente da quelle di conducibilità (o di permeabilità). Scegliendo opportunamente il valore del rapporto f/f0 è possibile fare in modo che le curve tratteggiate (dovute a variazione strutturali) e quelle continue (dovute a variazione di parametri fisici) siano inclinate di 45° nel piano complesso di Fig. 40 in modo che i due effetti siano nettamente separati.
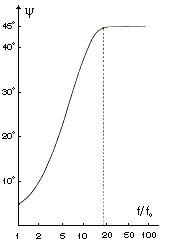
Fig. 40: Angolo tra curve a diametro variabile e a conducibilità variabile per il grafico di Fig. 39 a).
Come si può vedere osservando la Fig. 40 questo fatto si verifica soprattutto alle più alte frequenze. Tuttavia la scelta di una frequenza di test troppo elevata non è conveniente perché, a causa dell'effetto pelle, l'esame del materiale si limiterebbe alla sua superficie e quindi non sarebbe in grado di rivelarne i difetti in profondità. Per tale motivo si usa normalmente un campo di frequenze che va da 10 a 50 volte la frequenza limite.
La Fig. 39 a) e b) mette anche in evidenza la notevole diversità del risultato ottenuto a seconda che i materiale in esame sia ferromagnetico o diamagnetico. Questa difficoltà, che si incontra quando si eseguono dei test su materiali differenti, può essere aggirata sovrapponendo al campo magnetico variabile un campo continuo molto intenso che, come mostrato in Fig. 41, satura il materiale e in pratica lo trasforma in un materiale paramagnetico per cui vale sempre la Fig. 39 a).
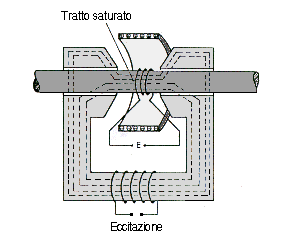
Fig. 41: Dispositivo con magnete di saturazione.
27.-Impiego pratico del metodo.
Allo scopo di misurare separatamente gli effetti dovuti a variazione nelle dimensioni (diametro) e nella conducibilità occorre fare uso di una disposizione circuitale, come ad esempio quella di Fig. 42, in cui la tensione misurata sia eguale alla differenza tra quella dovuta ad un cilindro di riferimento e quella nel cilindro sotto test. In questo modo si ottengono solo quelle variazione di tensione la cui fase permette di risalire alla natura esatta del difetto quale ad esempio porosità, cricche ecc.
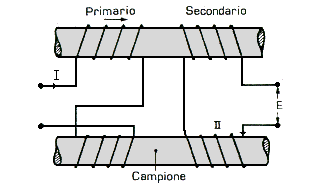
Fig. 42: Circuito per il rilevamento delle variazioni.
Per esempio in Fig. 43 è riportato schematicamente l'effetto dovuto ad una variazione di diametro (vettore 1 e 2) quello dovuto ad una variazione di conducibilità (vettore 3) e quello dovuto ad una cricca superficiale che provoca un effetto composito (vettore 4).
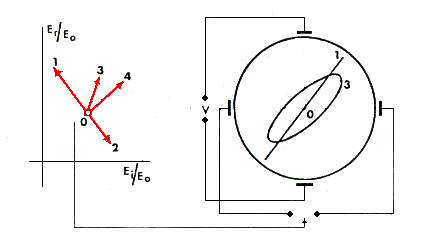
Fig. 43: Variazioni di tensione indotta per cause diverse e dispositivo di rilevamento.
Le variazioni in questione vengono inviate alle placche verticali di un oscillografo, mentre a quelle orizzontali viene applicata una tensione in fase con quella che alimenta la bobina induttrice primaria. Quest'ultima tensione può essere però ruotata di fase con un opportuno sfasatore in modo da allinearsi con uno dei vettori di Fig. 43. Se ad esempio quest'ultima si allinea con il vettore di variazione del diametro si ottiene sullo schermo una linea o una ellisse a seconda che l'effetto di variazione sia rispettivamente dovuto ad una variazione di diametro o di conducibilità.
In molte applicazioni pratiche non è possibile utilizzare una bobina che contiene il materiale conduttore, come nel caso del cilindro visto in precedenza. Si usa allora una coppia di bobine inserite in un nucleo di ferrite ad olla, come è mostrato in Fig. 44.
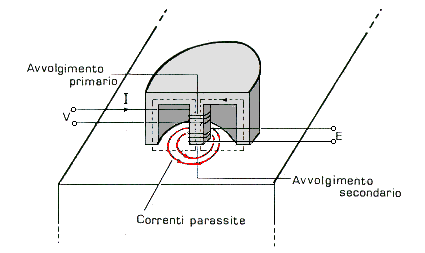
Fig. 44: Rilevamento di difetti con bobina esterna.
Naturalmente i concetti relativi al piano complesso della corrente indotta valgono ancora, seppure con qualche modifica. In particolare al posto del fattore di riempimento g si considera la distanza testina-superficie. Anche in questo caso difetti di natura diversa danno luogo a variazioni di segnale con fase diversa e ben determinata.
Va notato infine che la distribuzione delle correnti parassite interessa un volume molto ristretto per cui il test che si effettua è di tipo localizzato e permette quindi di rilevare difetti su viti, bulloni, dadi ed altri particolari miniaturizzati, inseriti in strutture più ampie come l'ala di un aeroplano o il contenitore di un reattore nucleare ecc.
Fonte: http://www.carloanti.it/fgiberto/appunti/doc/Trasduttori.doc
Sito web : http://www.carloanti.it/fgiberto/default.asp
Autore del testo: non indicato nel documento di origine
Parola chiave google : Trasduttori e dispositivi di misura tipo file : doc
Visita la nostra pagina principale
Trasduttori e dispositivi di misura
Termini d' uso e privacy