Geometria analitica
Geometria analitica
Questo sito utilizza cookie, anche di terze parti. Se vuoi saperne di più leggi la nostra Cookie Policy. Scorrendo questa pagina o cliccando qualunque suo elemento acconsenti all’uso dei cookie.I testi seguenti sono di proprietà dei rispettivi autori che ringraziamo per l'opportunità che ci danno di far conoscere gratuitamente a studenti , docenti e agli utenti del web i loro testi per sole finalità illustrative didattiche e scientifiche.
Le informazioni di medicina e salute contenute nel sito sono di natura generale ed a scopo puramente divulgativo e per questo motivo non possono sostituire in alcun caso il consiglio di un medico (ovvero un soggetto abilitato legalmente alla professione).
Geometria analitica
Introduzione:
La geometria analitica ( γεω.μετρ.ία - ανά.λυ.σις da λυω = sciogliere, risolvere, o αλίζω = unisco ) è una branca molto semplice della matematica che affronta problemi geometrici in un piano cartesiano, il che significa essenzialmente risolvere con metodi algebrici elementari diverse leggi naturali e geometriche e descriverle nel piano riferendosi a degli assi opportunamente scelti .
Tanto la geometria quanto le prime relazioni algebriche hanno origine al crepuscolo della preistoria, con lo sviluppo delle prime grandi civiltà nel nord Africa, nella Mesopotamia e nel medio oriente.
A quel tempo la matematica serviva a scopi pratici come ad esempio regolare i confini delle proprietà dei terreni, da cui il nome γεω.μετρ.έω – misuro la terra, ma presto divenne una pratica utile al commercio, alle costruzioni, alla politica economica ed in particolare ai rilevamenti astronomici, all’epoca ancora pregni di significati mistici ed immaginarie coincidenze con la vita reale, sebbene talmente precisi da risultare utili ancora oggi validi come fonte diretta della configurazione celeste antica.
Furono però tali necessità a spingere l’uomo ad intendersi di matematica, e tanto i maghi quanto i commercianti conoscevano alcuni fondamenti di algebra senza però esserne coscienti.
Le prime unità di misura erano assai rudimentali: si utilizzavano proporzioni umane come la spanna, il braccio, il piede, e spesso le quantità delle merci andavano a barili, giare, a seconda del tipo di contenitore, quindi gli scambi dell’epoca dovevano essere facilmente soggetti a lunghe trattative circa il reale valore in questione, pratica ancora diffusissima in medio oriente e Africa.
La matematica verrà battezzata come tale molti millenni dopo la sua comparsa, nel 300 a.C. in seguito agli studi del filosofo greco Pitagora, che analizzò a fondo il significato dei numeri al livello logico disponendo ad esempio delle pietruzze ( in greco καλκολος, da cui la parola calcoli ) ed osservando certe cadenze eseguendo determinate operazioni, creando in definitiva i numeri come entità. Alcune operazioni erano note già da prima presso gli arabi, gli ebrei ed i persiani, ma il fervore dell’epoca riguardo a questi argomenti portava verso un’unione tra la geometria, di cui già Talete si era interessato quasi un secolo prima, e le proprietà algebriche dei numeri, un concetto astratto e non dimostrabile ai sensi ma perfettamente funzionale al livello pratico.
Per molti secoli la ricerca in tal senso fu lenta: era ancora la geometria grafica a predominare sulla parte analitica: ma fu grazie alla ricerca sulle geometrie euclidee che si ebbe il successivo sviluppo:
a partire dal 1400 si nota una svolta verso la resa grafica delle astrazioni algebriche, ed iniziarono ad essere note le relazioni che esistono tra le curve nel piano cartesiano e le caratteristiche di alcuni fenomeni che si osservavano in natura, sino a divenire, con la meccanica, parte attiva nella progettazione di macchine e strumenti di precisione, costituendo in definitiva il substrato indispensabile al fenomeno del progresso tecnologico dei giorni nostri.
Il grande vantaggio è nel fatto che molti fenomeni naturali sono approssimabili da leggi matematiche come la retta o la parabola, con la differenza che i risultati di un’analisi empirica o sensoriale non sono mai precisi ed affidabili come i risultati di un’analisi numerica.
 CONSIDERAZIONI SUGLI ASSI CARTESIANI
CONSIDERAZIONI SUGLI ASSI CARTESIANI
Renes Descartes, meglio noto come Cartesio (1600), ebbe l’intuizione di introdurre un metodo grafico, già studiato da Nicola d’Oresme, (1350) per discretizzare lo spazio: schematizzo un piano descrivendo due assi ortogonali tra loro, appartenenti al piano ed assumo come zero assoluto l’intersezione tra questi. Generando una serie di valori positivi e negativi intorno allo zero su entrambi gli assi, ogni punto nel piano viene rappresentato da una coppia di coordinate leggibili dagli assi in longitudine (ascisse X) o in altitudine (ordinate Y). Per indicare dove un punto A si trova nel piano cartesiano, per convenzione si scrive prima l’ascissa, poi, separata con un punto e virgola, l’ordinata, quindi nel nostro caso A ( 2 ; 3 ). Notare che le coordinate possono essere negative: osservare il punto B ( – 2 ; – 2) in figura.
In tal modo se paragoniamo una serie di dati X ad un’altra serie Y, una curva nel piano cartesiano rappresenta il comportamento del fenomeno che tali dati descrivono per ogni punto P (X;Y).
Ecco alcuni esempi di come il metodo di Cartesio viene ancora oggi largamente utilizzato:
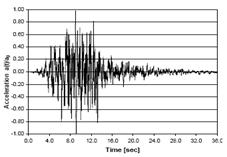
Accelerogramma di un sisma:
Asse Y: accelerazione
Asse X: tempo
Descrive le azioni di un terremoto al trascorrere del tempo
Elasticità di un materiale
Asse Y: tensione esercitata
Asse X: deformazione del materiale
Descrive il comportamento dei un materiale
al variare dell’intensità della forza di prova
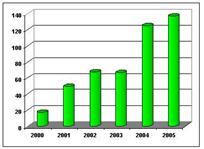
Istogramma dei visitatori in un sito:
Asse Y: numero di visite
Asse X: anni (tempo)
Sebbene graficizzato tridimensionale, è un grafico cartesiano a due assi.
Densità di probabilità (tridimensionale)
Asse Y: una variabile
Asse X: un’altra variabile
Asse Z: valori della probabilità
Descrive la probabilità che accada un evento
Gli assi di valore nullo sono un riferimento umano per riportare la geometria alla matematica.
È controistintuale, ma l’equazione dell’asse delle X è y=0 mentre per l’asse delle Y è x=0.
Distanza di due punti
Tra le applicazioni fondamentali per l’intera analisi numerica delle forme geometriche è senz’altro il teorema della distanza tra due punti. Ma, in pratica, questi altro non è che un’applicazione analitica del teorema di Pitagora nel piano cartesiano.
Ci ricordiamo dalle elementari che “In un triangolo rettangolo, il quadrato costruito sull’ipotenusa è uguale alla somma dei quadrati costruiti sui cateti”, che tradotto in linguaggio matematico:
 √ C1 2 + C2 2
√ C1 2 + C2 2
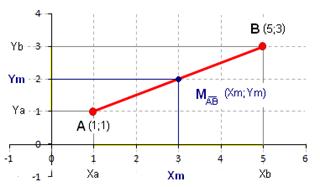
 Ma se osserviamo il grafico nel piano cartesiano, la distanza tra i due punti A e B è un segmento che stacca due proiezioni sugli assi.
Ma se osserviamo il grafico nel piano cartesiano, la distanza tra i due punti A e B è un segmento che stacca due proiezioni sugli assi.
Tali proiezioni individuano le lunghezze dei cateti AC e BC di un triangolo rettangolo in C, quindi si può applicare il teorema di Pitagora.
Le lunghezze dei cateti però sono espresse nel sistema cartesiano, quindi si deve operare una piccola accortezza: appare scontato che il segmento AC in figura ha lunghezza 3, poiché istintivamente si è operato 4 – 1 = 3, ovvero
il massimo meno il minimo. Pertanto, i cateti verranno scritti usando i nomi delle coordinate dei punti A (Xa;Ya) e B (Xb;Yb) ovvero:
Dab = √ ( Xa – Xb ) 2 + ( Ya – Yb ) 2
 Tale formula algebrica delle distanze è valida anche qualora le coordinate avessero valori negativi o invertendo l’ordine, basta mantenere bene la correlazione: se si inizia con Xb - Xa si deve dopo considerare Yb – Ya. Facciamo un esempio:
Tale formula algebrica delle distanze è valida anche qualora le coordinate avessero valori negativi o invertendo l’ordine, basta mantenere bene la correlazione: se si inizia con Xb - Xa si deve dopo considerare Yb – Ya. Facciamo un esempio:
Fig. 1) A ( 1 ; 1 )
B ( 4 ; 5 )

Dab = √ ( 1 – 4 ) 2 + ( 1 – 5 ) 2 =
 √ 25 = 5
√ 25 = 5
Fig. 2) A ( - 1 ; - 1 )
B ( 2 ; 3 )
 √ ( – 1 – 2 ) 2 + ( – 1 – 3 ) 2 =
√ ( – 1 – 2 ) 2 + ( – 1 – 3 ) 2 =
 √ 25 = 5
√ 25 = 5
Si evince un ulteriore punto da specificare: la distanza tra due punti non può essere negativa.
Prima di tutto, una distanza senza riferimento si intende essere una quantità positiva, ma parlando algebricamente, è la radice quadrata della somma di due quadrati, pertanto certamente non negativa.
Punto medio di un segmento
Dati due punti A (Xa ; Ya) e B (Xb ; Yb), il punto medio MAB (Xm ; Ym) avrà coordinate calcolabili secondo le seguenti formule:
Xm = (Xa + Xb)
2
Ym = (Ya + Yb)
2
Ovvero, nel nostro caso, MAB ( 3 ; 2 ):
Xm = (Xa + Xb) = 1 + 5 = 3
2 2
Ym = (Ya + Yb) = 1 + 3 = 2
2 2
Vale ovviamente anche per punti aventi coordinate nulle o negative.
Traslazione degli assi
L’origine degli assi O (0;0) è il riferimento generale di tutto il sistema cartesiano.
Tuttavia, per generalizzare alcune leggi è necessario assumere un riferimento secondario, sempre riferito all’origine, che funga da origine traslata di un sistema cartesiano a sua volta traslato.
Sarà più chiaro nei fasci di rette o con la circonferenza.
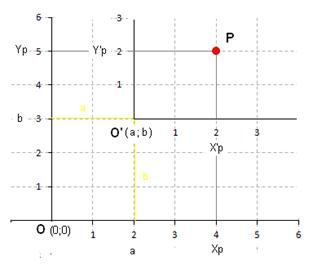
La dimostrazione consiste nel nominare il nuovo centro degli assi cercato come un punto O’ ( a ; b ) ed osservare con che relazione cambiano le coordinate di un qualunque punto P ( Xp; Yp ) appartenente al piano nei due sistemi.
Nel nuovo sistema con origine in O’ il punto P avrà nuove coordinate diventando P ( X’p ; Y’p ) :
X’p = Xp – a
Y’p = Yp – b
Ovvero, idealmente “sottraggo terreno in partenza per far credere di partire più avanti” .
Nel nostro caso, il punto ha coordinate P (4;5) nel sistema di riferimento in O (0;0) mentre nel sistema traslato in O’ (2;3) assume coordinate: P ( 2;2)
X’p = Xp – a = 4 – 2 = 2
Y’p = Yp – b = 5 – 3 = 2
Vale ovviamente anche per punti e traslazioni a coordinate nulle o negative.
Troveremo spesso le equazioni espresse ad esempio y = 2x2 + 3, poiché è una curva geometrica che si sviluppa n un grafico Y–X . Se avessi voluto rappresentare la legge di Hooke sull’elasticità, avrei scritto σ = E ε ; la curva che ne deriva è riferita ad un grafico di assi σ - ε , rispettivamente: tensione prodotta e deformazione. Il sistema di riferimento XY è generico, ma trasferendo i medesimi principi di geometria analitica usando grandezze fisiche si ottengono validi risultati, sia nei riferimenti piani che in quelli spaziali.
Vale ovviamente anche per punti e traslazioni a coordinate nulle o negative.
Fonte: http://www.webalice.it/greendog/cs/files/matematica20.doc
Autore del testo: non indicato nel documento di origine
Parola chiave google : Geometria analitica tipo file : doc
COORDINATE CARTESIANE SULLA RETTA r
- Tra i numeri reali R e i punti di una retta r , esiste una corrispondenza biunivoca, perché ad ogni punto P appartenente alla retta r , si può associare uno e un solo numero reale x , detto ascissa del punto P.
-Per stabilire questa corrispondenza biunivoca occorre fissare :
a) una retta orientata r, stabilendo su r un verso di percorrenza positivo + , da sinistra verso destra;
b) un punto O detto origine
c) una unità di misura

se il punto P segue O, al punto P si associa il numero reale + x ; se il punto P precede O, al punto P si associa il numero reale - x ; il valore di x è detto ASCISSA del punto P
1) DISTANZA TRA 2 PUNTI A e B SULLA RETTA r
La distanza tra 2 punti A e B , è la lunghezza del segmento AB e si calcola con la formula : AB = | x2 – x1 |
2) PUNTO MEDIO M DEL SEGMENTO AB
Si determina con la formula della media aritmetica tra le ascisse dei punti A e B : xM = 
COORDINATE CARTESIANE NEL PIANO
- Se consideriamo 2 rette orientate tra loro perpendicolari ( = ortogonali) , che si intersecano in un punto O detto origine, poi fissiamo su ogni retta una unità di misura, avremo un sistema di riferimento cartesiano ortogonale Oxy.
La retta orientata orizzontale è detta asse delle ascisse o asse delle x;
la retta orientata verticale è detta asse delle ordinate o asse delle y.
I due assi dividono il piano in 4 parti , dette quadranti
- Esiste una corrispondenza biunivoca tra un punto P del piano cartesiano ed una coppia ordinata di numeri reali ( x; y) ; perché ad ogni punto P corrisponde una e una sola coppia di valori ( x;y) e viceversa ad ogni coppia di valori (x;y) corrisponde uno e un solo punto P.
- Il primo numero x è detto ascissa del punto P , il secondo numero y è detto ordinata del punto P.
x, y sono dette coordinate cartesiane del punto P.
1) DISTANZA TRA 2 PUNTI A e B DEL PIANO CARTESIANO
La distanza tra 2 punti A e B , non è altro che la lunghezza del segmento AB , che si trova applicando il teorema di Pitagora al triangolo ABC , per cui :
AB = 
* Se x1 = x2 ® AB = | y2 – y1 | * Se y1 = y2 ® AB = | x2 – x1 |
2) PUNTO MEDIO DI AB
Il punto medio M del segmento AB , è quel punto che divide AB in due parti uguali , quindi le coordinate del punto medio M si trovano con la formula della media aritmetica tra le ascisse e le ordinate di A e B ®
M (  )
)
3) BARICENTRO DI UN TRIANGOLO ABC
Il baricentro di un triangolo è il punto di incontro delle 3 mediane . La mediana di un triangolo è il segmento che unisce un vertice del triangolo col punto medio del lato opposto.
Tuttavia il baricentro G di un triangolo del quale sono note le coordinate dei 3 vertici A,B,C , si può trovare applicando la formula della media aritmetica ® G (  )
)
EQUAZIONE DELLA RETTA
- Def.1 Date due grandezze variabili x e y , si dice funzione reale ad una variabile reale e si scrive y = f(x) una relazione o legge che associa ad ogni valore reale di x , uno e un solo valore reale di y.
x è la variabile indipendente , y è la variabile dipendente , perché dipende dai valori attribuiti alla variabile x.
DOMINIO = insieme dei valori reali attribuiti alla variabile x
CODOMINIO = insieme dei valori reali assunti dalla variabile y
- Nel piano cartesiano ortogonale ad ogni funzione y = f(x) si può associare un grafico o disegno , che si ottiene unendo tutti i punti P(x;y) , le cui coordinate cartesiane sostituite nella funzione , la soddisfano.
- La retta è una funzione lineare , cioè una funzione espressa da una equazione di 1° grado nelle variabili x e y.
- L’equazione di una retta può essere scritta in due forme:
a) forma implicita o normale : ax + by + c = 0
b) forma esplicita : y = mx + q (che si ricava dalla forma implicita , esplicitando la variabile y , per cui y = -  è detto termine noto .
è detto termine noto .
m rappresenta l’inclinazione della retta rispetto al semiasse positivo delle x :
* se m > 0 ® la retta forma un angolo acuto col semiasse positivo delle x
* se m < 0 ® la retta forma un angolo ottuso col semiasse positivo delle x
* se m = 0 ® la retta è parallela all’asse delle x e la sua equazione esplicita diventa y = q
q è l’ordinata all’origine , cioè l’ordinata del punto in cui la retta interseca l’asse delle y.
* se q = 0 ® la retta ha il grafico che passa per l’origine degli assi , e la sua equazione è y = mx .
- EQUAZIONI DI RETTE PARTICOLARI
asse x ® la sua equazione è y = 0
asse y ® la sua equazione è x = 0
retta parallela all’asse x ® la sua equazione è y = q
retta parallela all’asse y ® la sua equazione è x = h
retta bisettrice del I e III quadrante ® la sua equazione è y = x
retta bisettrice del II e IV quadrante ® la sua equazione è y = - x
- APPARTENENZA DI UN PUNTO P AD UNA RETTA r
Un punto P ( x0,y0) appartiene ad una retta , cioè si trova esattamente sul grafico della retta ,ovvero quella retta passa proprio per il punto P , quando le coordinate di P , sostituite ad x e y , nell’equazione della retta , danno un’uguaglianza vera.
- GRAFICO DI UNA RETTA
Per disegnare il grafico di una retta servono soltanto due punti , perché per due punti passa 1 e 1 sola retta .
- INTERSEZIONE TRA DUE RETTE r , s .
Basta risolvere il sistema formato dalle loro equazioni :
ax + by + c = 0
a’x + b’y + c = 0
- se a/a’= b/b’ =c/c’ ® rette coincidenti ® sistema indeterminato con infinite soluzioni , cioè tutti i punti delle due rette che coincidono
- se a/a’= b/b’ ¹c/c’ ® rette parallele ® sistema impossibile con nessuna soluzione
- se a/a’¹ b/b’ ® rette incidenti ® sistema determinato con una sola soluzione, ovvero il punto comune alle due rette P ( x;y)
- FASCIO IMPROPRIO DI RETTE
E’ il fascio di tutte le rette del piano tra loro parallele. Tali rette hanno tutte lo stesso valore di m , mentre q è variabile.
Es : y = 2x +q ; y = -3x + q
- FASCIO PROPRIO DI RETTE
Sono tutte le rette passanti per uno stesso punto P( x0;y0) , detto CENTRO DEL FASCIO .
Tale fascio ha equazione : y – y0 = m ( x – x0 ) . In questo caso m è variabile .
- EQUAZIONE RETTA PASSANTE PER UN PUNTO P( x0;y0) e con coefficiente angolare noto m :
Per trovare l’equazione di tale retta basta applicare la formula y – y0 = m (x –x0 )
Es P ( 2; 5) m = - 4
- COEFFICIENTE ANGOLARE DELLA RETTA PASSANTE PER DUE PUNTI A(x1;y1) e B(x2;y2) Si calcola il coefficiente angolare della retta passante per i due punti , con la formula :
m = 
- EQUAZIONE DELLA RETTA PASSANTE PER DUE PUNTI A(x1;y1) e B(x2;y2)
Si trova tale retta utilizzando la formula : 
- EQUAZIONE ASSE DI UN SEGMENTO AB
Si definisce asse del segmento AB , la retta perpendicolare al segmento AB , nel suo punto medio M .L’asse gode della proprietà che tutti i punti situati sull’asse hanno la stessa distanza dagli estremi dell’asse. Per cui l’equazione dell’asse di AB si può trovare sfruttando tale proprietà : PA2 = PB2 ®
(x-x1)2 + (y –y1)2 = (x –x2)2 + ( y –y2)2
- DISTANZA DI UN PUNTO P(x0;y0) DALLA RETTA r
Si calcola la distanza punto-retta , utilizzando l’equazione della retta e le coordinate cartesiane del punto P , con la formula :
d(P;r) = 
PARABOLA
Def. E’ il luogo geometrico dei punti P del piano equidistanti da un punto fisso detto fuoco e da una retta fissa detta direttrice .
L’equazione della parabola è quella di una funzione di 2° grado , del tipo ax2 + bx + c = 0 con a,b,c Î R.
- se a > 0 ® parabola concava verso l’alto
- se a < 0 ® parabola concava verso il basso
Per disegnare una parabola servono questi punti :
- Vertice V (  )
)
- i punti di intersezione con gli assi cartesiani , precisamente :
 A = punto di intersezione con asse y , che si trova risolvendo il sistema : y = ax2 + bx + c
A = punto di intersezione con asse y , che si trova risolvendo il sistema : y = ax2 + bx + c
x = 0

B , C = punti di intersezione con asse x , che si trovano risolvendo il sistema : y = ax2 + bx + c
y = 0
L’asse di simmetria della parabola è la retta passante per il vertice V e parallela all’asse y , pertanto la sua equazione è : x =  , essa divide la parabola in due parti simmetriche tra loro.
, essa divide la parabola in due parti simmetriche tra loro.
- Se la parabola ha equazione y = ax2 ® il vertice coincide con l’origine , quindi V (0;0)
- Se la parabola ha equazione y = ax2 + bx ® la parabola passa per l’origine , perché la sua equazione manca del termine noto.
- Se la parabola ha equazione y =ax2 + c ® il vertice si trova su asse y ® V( 0 ; - )
)
CIRCONFERENZA
Def. E’ il luogo geometrico dei punti P(x;y) del piano equidistanti da un punto fisso detto centro C ; tale distanza è detta raggio r .
L’equazione cartesiana di una circonferenza di centro C ( a ; b ) e raggio r è pertanto :
( x - a )2 + (y - b )2 = r 2
Sviluppando i quadrati indicati da tale formula , si perviene , con opportune sostituzioni all’equazione della circonferenza in forma normale o canonica : x2 + y2 + ax + by + c = 0 .
Esistono delle formule che mi fanno passare da a, b, c ad a ; b ed r ®
a = -  a2/4 + b2/4 – c
a2/4 + b2/4 – c
viceversa : a = -2 a ; b = -2 b ; c = a2 + b 2 - r2
Se a = b = c = 0 ® x2 + y2 = 0 è l’equazione della circonferenza degenere , perchè si riduce al solo centro C ( 0 ;0 )
Se a = b = 0 ® x2 + y2 + c = 0 è l’equazione di una circonferenza con centro C(0 ,0) e raggio r =  , purchè -c > 0 , altrimenti non esiste la radice quadrata di un m numero negativo .
, purchè -c > 0 , altrimenti non esiste la radice quadrata di un m numero negativo .
Se c = 0 ® x2 + y2 + ax + by = 0 è l’equazione di una circonferenza passante per l’origine O ( 0;0 ) , perché manca il termine noto .
IPERBOLE EQUILATERA
E’ la funzione che rappresenta la proporzionalità inverse tra le due grandezze variabili x e y.
Pertanto l’equazione di un’iperbole equilatera è : y =  R .
R .
Essa è definita per qualsiasi valore di x , escluso x = 0 , perché non esiste il valore y = 
Il grafico dell’iperbole equilatera è formato da 2 rami , non passanti per l’origine degli assi cartesiani , ma aventi per asin-
toti gli assi stessi.
- Se k > 0 ® i 2 rami di iperbole si trovano nel 1°e 3° quadrante
- Se k < 0 ® i 2 rami di iperbole si trovano nel 2°e 4° quadrante
Fonte: http://www.bassilo.it/documents/GEOMETRIA%20%20ANALITICA-teoria.doc
Autore del testo: non indicato nel documento di origine
Parola chiave google : Geometria analitica tipo file : doc
Geometria analitica
Visita la nostra pagina principale
Geometria analitica
Termini d' uso e privacy